单目相机标定理论及张正友标定法总结
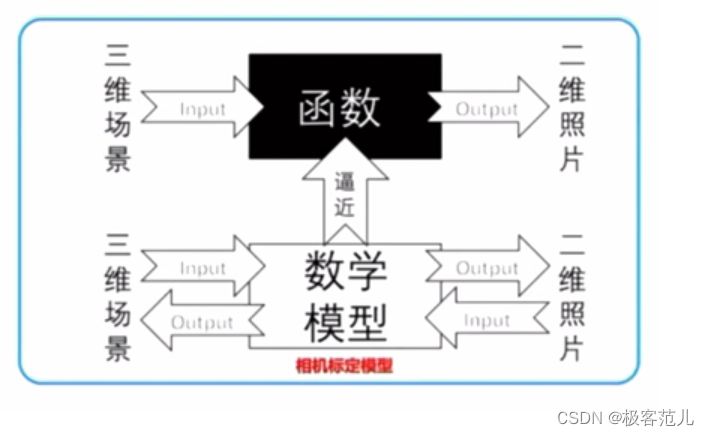
我们的真实世界是三维的,拍摄的图片是二维的,相机起到的就是映射的过程,可以把相机看成一个广义的函数,输入的三位场景,输出是二维的图片(灰度图),一般情况下我们看到的是彩色图,彩色图是RGB三通道,每个通道可以认为是一张灰度图,也就是三维场景经过广义的函数(相机)得到照片,函数(映射关系)是不可逆的,也就是说我们无法从二维照片恢复出三维世界,相机是物理模型很难用数学模型完全量化,所以我们就需要一个简化的数学模型来代表复杂的三维到二维的成像过程。
一、相机标定
1、相机的数学意义
- 真实世界是三维的,拍摄的图片是二维的
- 相机(看成一个广义函数 ):输入三维场景,输出是二维的图片(灰度图)
- 彩色围是RGB三通道,每个通道可以认为是一张灰度图
- 函数( 映射关系)是不可逆的,也就是无法从二维照片恢复出三维世界
2、相机标定的意义
- 相机标定 : 使用带有pattern的标定板来求解相机参数的过程
- 用一个简化的数学模型来代表复杂的三维到二维的成像过程
- 相机参数包括:相机内参( 焦距 ),外参( 旋转矩阵 ),镜头畸变参数
- 用途 : 畸变校正,双目视觉,结构光,三维重建,SLAM等等
二、小孔成像
1、小孔成像原理
简单没有镇头
有一个小的光圈
真实世界的3D物体,发出光线通过光圈相机的另一侧,像平面位置,得到一个倒立的实像