最优控制 1:最优控制中不同情形下泛函取到极值的必要条件
最优控制 1:最优控制中不同情形下泛函取到极值的必要条件
- 最优控制 (1):最优控制中不同情形下泛函取到极值的必要条件
- 引言
- 一般问题
- 1. t 0 t_0 t0 固定, t 1 t_1 t1 固定, x 0 = x ( t 0 ) x_0=x(t_0) x0=x(t0) 固定, x 1 = x ( t 1 ) x_1=x(t_1) x1=x(t1) 固定
- 2. t 0 t_0 t0 固定, x 0 = x ( t 0 ) x_0=x(t_0) x0=x(t0) 固定, t 1 t_1 t1 自由, x 1 = x ( t 1 ) x_1=x(t_1) x1=x(t1) 自由
- 3. t 0 t_0 t0 固定, x 0 = x ( t 0 ) x_0=x(t_0) x0=x(t0) 固定, t 1 t_1 t1 固定, x 1 = x ( t 1 ) x_1=x(t_1) x1=x(t1) 自由
- 4. t 0 t_0 t0 固定, x 0 = x ( t 0 ) x_0=x(t_0) x0=x(t0) 固定, x 1 = x ( t 1 ) x_1=x(t_1) x1=x(t1) 固定, t 1 t_1 t1 自由
- 总结
最优控制 (1):最优控制中不同情形下泛函取到极值的必要条件
引言
众所周知,强化学习在控制领域有一个别称,叫自适应动态规划 (Adaptive Dynamic Programming )或近似动态规划 (Approximate Dynamic Programming)。这个东西最开始的初衷 (不论是被刻意赋予的初衷,还是的的确确有这么一个初衷)是去解决最优控制的问题。
最优控制其实与泛函的联系十分紧密。如果说函数本身的求解比较复杂的话,只能说泛函的求解更复杂。很多函数本身是具备一些形式和性质的,只不过是求解过程太复杂。但是泛函本身就是一个“虚无缥缈”的东西,甚至连函数的形式都不知道,只知道零点的函数值为零,这让求解根本无从下手。
遗憾的是,很多最优控制问题就偏偏要求解这些泛函问题。目前已经有很多工具可以做到,极小值原理,动态规划,黎卡提方程工具包之类的 (我都没用过,只是听说过),但是有时候他的求解速度真的是感人。
所以,强化学习后来就被用来解最优控制中的泛函,举个例子:
已知系统模型
x
˙
=
f
(
x
)
\dot{x}=f(x)
x˙=f(x),某一时刻的正定代价函数为
g
=
g
(
x
,
x
˙
,
t
)
g=g(x,\dot{x},t)
g=g(x,x˙,t),求解一个控制器
u
(
t
)
u(t)
u(t),使得
J
=
∫
t
0
t
1
k
1
g
(
x
,
x
˙
,
t
)
+
k
2
u
2
d
t
J=\int_{t_0}^{t_1}{k_1g(x,\dot{x},t)+k_2u^2}dt
J=∫t0t1k1g(x,x˙,t)+k2u2dt最小。
如果 f f f 和 g g g 都比较简单,其实用笔也能算出来。但是如果 f f f 和 g g g 都比较复杂,并且没有任何规律可循,那么不仅用笔没法算,而且用工具包也不好求解,这个时候强化学习就体现出作用了(虽然不一定好使)。
因此要了解强化学习控制,掌握必须的最优控制的基本理论和尝试也是必要的。
一般问题
将上式一般化,可以得到一般化的泛函形式的代价函数为
J
(
x
)
=
∫
t
0
t
1
g
[
x
(
t
)
,
x
˙
(
t
)
,
t
]
d
t
J(x)=\int_{t_0}^{t_1}{g\left[x(t),\dot{x}(t),t\right]}dt
J(x)=∫t0t1g[x(t),x˙(t),t]dt
简记为
J
(
x
)
=
∫
t
0
t
1
g
(
x
,
x
˙
)
d
t
J(x)=\int_{t_0}^{t_1}{g(x,\dot{x})}dt
J(x)=∫t0t1g(x,x˙)dt
最优控制的目标,就是解出
x
(
t
)
x(t)
x(t),即当
x
x
x 的时域曲线应该是什么样的时候,
J
(
x
)
J(x)
J(x) 最小。下边分多钟情况讨论。
1. t 0 t_0 t0 固定, t 1 t_1 t1 固定, x 0 = x ( t 0 ) x_0=x(t_0) x0=x(t0) 固定, x 1 = x ( t 1 ) x_1=x(t_1) x1=x(t1) 固定
由于初始时间、终止之间、初始状态和终止状态都被固定,所以
J
J
J 的不确定性只能被中间时刻的
x
x
x 影响,那么记
x
x
x 的变分为
δ
x
\delta x
δx,进而所导致的
J
J
J 的变分为
δ
J
\delta J
δJ。则有
δ
J
=
J
(
x
+
δ
x
,
x
˙
+
δ
x
˙
)
−
J
(
x
)
=
∫
t
0
t
1
g
(
x
+
δ
x
,
x
˙
+
δ
x
˙
)
−
g
(
x
,
x
˙
)
d
t
\begin{align} \begin{aligned} \delta J &= J(x+\delta x, \dot{x}+\delta \dot{x})-J(x)\\ &= \int_{t_0}^{t_1}{g(x+\delta x,\dot{x}+\delta \dot{x})-g(x,\dot{x})}dt \end{aligned} \end{align}
δJ=J(x+δx,x˙+δx˙)−J(x)=∫t0t1g(x+δx,x˙+δx˙)−g(x,x˙)dt
对 (1) 中第一项在
(
x
,
x
˙
)
(x,\dot{x})
(x,x˙) 处一次 Taylor 展开
g
(
x
+
δ
x
,
x
˙
+
δ
x
˙
)
=
g
(
x
,
x
˙
)
+
∂
g
(
x
,
x
˙
)
∂
x
δ
x
+
∂
g
(
x
,
x
˙
)
∂
x
˙
δ
x
˙
g(x+\delta x,\dot{x}+\delta \dot{x})=g(x,\dot{x}) + \frac{\partial g(x,\dot{x})}{\partial x}\delta x + \frac{\partial g(x,\dot{x})}{\partial \dot{x}}\delta\dot{x}
g(x+δx,x˙+δx˙)=g(x,x˙)+∂x∂g(x,x˙)δx+∂x˙∂g(x,x˙)δx˙
代回 (1),有
δ
J
=
∫
t
0
t
1
g
(
x
+
δ
x
,
x
˙
+
δ
x
˙
)
−
g
(
x
,
x
˙
)
d
t
=
∫
t
0
t
1
g
(
x
,
x
˙
)
+
∂
g
(
x
,
x
˙
)
∂
x
δ
x
+
∂
g
(
x
,
x
˙
)
∂
x
˙
δ
x
˙
−
g
(
x
,
x
˙
)
d
t
=
∫
t
0
t
1
∂
g
(
x
,
x
˙
)
∂
x
δ
x
+
∂
g
(
x
,
x
˙
)
∂
x
˙
δ
x
˙
d
t
\begin{align} \begin{aligned} \delta J &= \int_{t_0}^{t_1}{g(x+\delta x,\dot{x}+\delta \dot{x})-g(x,\dot{x})}dt\\ &= \int_{t_0}^{t_1}{g(x,\dot{x}) + \frac{\partial g(x,\dot{x})}{\partial x}\delta x + \frac{\partial g(x,\dot{x})}{\partial \dot{x}}\delta\dot{x}-g(x,\dot{x})}dt\\ &=\int_{t_0}^{t_1}{\frac{\partial g(x,\dot{x})}{\partial x}\delta x + \frac{\partial g(x,\dot{x})}{\partial \dot{x}}\delta\dot{x}}dt\\ \end{aligned} \end{align}
δJ=∫t0t1g(x+δx,x˙+δx˙)−g(x,x˙)dt=∫t0t1g(x,x˙)+∂x∂g(x,x˙)δx+∂x˙∂g(x,x˙)δx˙−g(x,x˙)dt=∫t0t1∂x∂g(x,x˙)δx+∂x˙∂g(x,x˙)δx˙dt
对 (2) 中第二项分部积分,有
∫
t
0
t
1
∂
g
(
x
,
x
˙
)
∂
x
˙
δ
x
˙
d
t
=
∂
g
(
x
,
x
˙
)
∂
x
˙
δ
x
∣
t
0
t
1
−
∫
t
0
t
1
d
d
t
∂
g
(
x
,
x
˙
)
∂
x
˙
δ
x
d
t
\int_{t_0}^{t_1}{\frac{\partial g(x,\dot{x})}{\partial \dot{x}}\delta\dot{x}}dt=\left.\frac{\partial g(x,\dot{x})}{\partial \dot{x}}\delta x\right|_{t_0}^{t_1}-\int_{t_0}^{t_1}{\frac{d}{dt}\frac{\partial g(x,\dot{x})}{\partial \dot{x}}\delta x}dt
∫t0t1∂x˙∂g(x,x˙)δx˙dt=∂x˙∂g(x,x˙)δx
t0t1−∫t0t1dtd∂x˙∂g(x,x˙)δxdt
代回 (2),有
δ
J
=
∫
t
0
t
1
∂
g
(
x
,
x
˙
)
∂
x
δ
x
+
∂
g
(
x
,
x
˙
)
∂
x
˙
δ
x
˙
d
t
=
∂
g
(
x
,
x
˙
)
∂
x
˙
δ
x
∣
t
0
t
1
+
∫
t
0
t
1
∂
g
(
x
,
x
˙
)
∂
x
δ
x
−
d
d
t
∂
g
(
x
,
x
˙
)
∂
x
˙
δ
x
d
t
\begin{align} \begin{aligned} \delta J &=\int_{t_0}^{t_1}{\frac{\partial g(x,\dot{x})}{\partial x}\delta x + \frac{\partial g(x,\dot{x})}{\partial \dot{x}}\delta\dot{x}}dt\\ &=\left.\frac{\partial g(x,\dot{x})}{\partial \dot{x}}\delta x\right|_{t_0}^{t_1}+ \int_{t_0}^{t_1}{\frac{\partial g(x,\dot{x})}{\partial x}\delta x -\frac{d}{dt}\frac{\partial g(x,\dot{x})}{\partial \dot{x}}\delta x}dt\\ \end{aligned} \end{align}
δJ=∫t0t1∂x∂g(x,x˙)δx+∂x˙∂g(x,x˙)δx˙dt=∂x˙∂g(x,x˙)δx
t0t1+∫t0t1∂x∂g(x,x˙)δx−dtd∂x˙∂g(x,x˙)δxdt
由于
x
(
t
0
)
x(t_0)
x(t0) 和
x
(
t
1
)
x(t_1)
x(t1) 都固定,所以
δ
x
(
t
0
)
=
δ
x
(
t
1
)
=
0
\delta x(t_0)=\delta x(t_1)=0
δx(t0)=δx(t1)=0,进而有
δ
J
=
∫
t
0
t
1
[
∂
g
(
x
,
x
˙
)
∂
x
−
d
d
t
∂
g
(
x
,
x
˙
)
∂
x
˙
]
δ
x
d
t
\begin{align} \begin{aligned} \delta J &=\int_{t_0}^{t_1}{\left[\frac{\partial g(x,\dot{x})}{\partial x} -\frac{d}{dt}\frac{\partial g(x,\dot{x})}{\partial \dot{x}}\right]\delta x}dt\\ \end{aligned} \end{align}
δJ=∫t0t1[∂x∂g(x,x˙)−dtd∂x˙∂g(x,x˙)]δxdt对于任意
x
x
x 均成立,所以,很自然地,有
∂
g
(
x
,
x
˙
)
∂
x
−
d
d
t
∂
g
(
x
,
x
˙
)
∂
x
˙
=
0
\begin{align} \begin{aligned} \frac{\partial g(x,\dot{x})}{\partial x} -\frac{d}{dt}\frac{\partial g(x,\dot{x})}{\partial \dot{x}}=0 \end{aligned} \end{align}
∂x∂g(x,x˙)−dtd∂x˙∂g(x,x˙)=0
这就是大名鼎鼎的欧拉方程,也叫欧拉-拉格朗日方程(这个结论得出是有定理保证的)。这个结论可以被用来解释为什么两点之间线段最短。
2. t 0 t_0 t0 固定, x 0 = x ( t 0 ) x_0=x(t_0) x0=x(t0) 固定, t 1 t_1 t1 自由, x 1 = x ( t 1 ) x_1=x(t_1) x1=x(t1) 自由
这种情况下由于末端时刻和末端状态都是可变的,因此
J
J
J 的变分是由
δ
t
1
\delta t_1
δt1 和
δ
x
\delta x
δx共同导致的。这里用一个图去表示
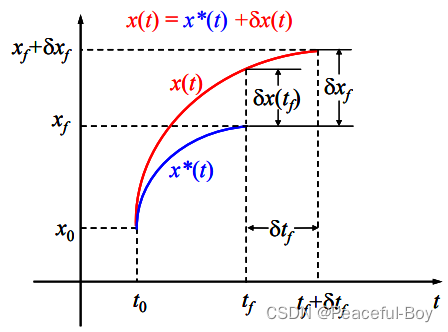
这里,蓝色的曲线表示最优的曲线,红色的曲线表示经过变分变化之后的曲线。与上一种情况类似,代价函数的变分为
δ
J
=
J
(
x
+
δ
x
,
x
˙
+
δ
x
˙
,
t
+
δ
t
)
−
J
(
x
)
=
∫
t
0
t
1
+
δ
t
1
g
(
x
+
δ
x
,
x
˙
+
δ
x
˙
)
d
t
−
∫
t
0
t
1
g
(
x
,
x
˙
)
d
t
=
∫
t
0
t
1
g
(
x
+
δ
x
,
x
˙
+
δ
x
˙
)
−
g
(
x
,
x
˙
)
d
t
+
∫
t
1
t
1
+
δ
t
1
g
(
x
+
δ
x
,
x
˙
+
δ
x
˙
)
d
t
\begin{align} \begin{aligned} \delta J &= J(x+\delta x, \dot{x}+\delta \dot{x}, t+\delta t)-J(x)\\ &= \int_{t_0}^{t_1+\delta t_1}{g(x+\delta x,\dot{x}+\delta \dot{x})dt-\int_{t_0}^{t_1}g(x,\dot{x})}dt\\ &= \int_{t_0}^{t_1}{g(x+\delta x,\dot{x}+\delta \dot{x})-g(x,\dot{x})}dt+\int_{t_1}^{t_1+\delta t_1}{g(x+\delta x,\dot{x}+\delta \dot{x})}dt \end{aligned} \end{align}
δJ=J(x+δx,x˙+δx˙,t+δt)−J(x)=∫t0t1+δt1g(x+δx,x˙+δx˙)dt−∫t0t1g(x,x˙)dt=∫t0t1g(x+δx,x˙+δx˙)−g(x,x˙)dt+∫t1t1+δt1g(x+δx,x˙+δx˙)dt
同样地,把
g
(
x
+
δ
x
,
x
˙
+
δ
x
˙
)
g(x+\delta x,\dot{x}+\delta \dot{x})
g(x+δx,x˙+δx˙) 在
(
x
,
x
˙
)
(x,\dot{x})
(x,x˙) 处 Taylor 展开,代回 (6),(6) 中第一项有
δ
J
1
=
∫
t
0
t
1
g
(
x
+
δ
x
,
x
˙
+
δ
x
˙
)
−
g
(
x
,
x
˙
)
d
t
=
∫
t
0
t
1
∂
g
(
x
,
x
˙
)
∂
x
δ
x
+
∂
g
(
x
,
x
˙
)
∂
x
˙
δ
x
˙
d
t
\begin{align} \begin{aligned} \delta J_1 &= \int_{t_0}^{t_1}{g(x+\delta x,\dot{x}+\delta \dot{x})-g(x,\dot{x})}dt\\ &= \int_{t_0}^{t_1}{\frac{\partial g(x,\dot{x})}{\partial x}\delta x + \frac{\partial g(x,\dot{x})}{\partial \dot{x}}\delta\dot{x}}dt\\ \end{aligned} \end{align}
δJ1=∫t0t1g(x+δx,x˙+δx˙)−g(x,x˙)dt=∫t0t1∂x∂g(x,x˙)δx+∂x˙∂g(x,x˙)δx˙dt
对 (6) 中第二项应用中值定理,有
δ
J
2
=
∫
t
1
t
1
+
δ
t
1
g
(
x
+
δ
x
,
x
˙
+
δ
x
˙
)
d
t
=
g
[
x
(
t
1
+
θ
δ
t
1
)
,
x
˙
(
t
1
+
θ
δ
t
1
,
)
,
t
1
+
θ
δ
t
1
]
δ
t
1
\begin{align} \begin{aligned} \delta J_2 &= \int_{t_1}^{t_1+\delta t_1}{g(x+\delta x,\dot{x}+\delta \dot{x})}dt\\ &= g\left[x(t_1+\theta\delta t_1), \dot{x}(t_1+\theta\delta t_1, ), t_1+\theta\delta t_1\right]\delta t_1 \end{aligned} \end{align}
δJ2=∫t1t1+δt1g(x+δx,x˙+δx˙)dt=g[x(t1+θδt1),x˙(t1+θδt1,),t1+θδt1]δt1
其中
0
<
θ
<
1
0<\theta<1
0<θ<1。考虑到标量函数
g
g
g 是连续函数,所以当
t
1
t_1
t1 的变分
δ
t
1
→
1
\delta t_1\rightarrow1
δt1→1 时,
g
g
g 的变化量是趋近于 0 的。即
g
[
x
(
t
1
+
θ
δ
t
1
)
,
x
˙
(
t
1
+
θ
δ
t
1
,
)
,
t
1
+
θ
δ
t
1
]
δ
t
1
=
g
[
x
(
t
1
)
,
x
˙
(
t
1
)
]
+
ϵ
g\left[x(t_1+\theta\delta t_1), \dot{x}(t_1+\theta\delta t_1, ), t_1+\theta\delta t_1\right]\delta t_1=g\left[x(t_1),\dot{x}(t_1)\right]+\epsilon
g[x(t1+θδt1),x˙(t1+θδt1,),t1+θδt1]δt1=g[x(t1),x˙(t1)]+ϵ
所以有
δ
J
2
=
g
[
x
(
t
1
)
,
x
˙
(
t
1
)
]
δ
t
1
=
g
(
x
,
x
˙
)
δ
t
1
\begin{align} \begin{aligned} \delta J_2 &= g\left[x(t_1),\dot{x}(t_1)\right]\delta t_1=g(x, \dot{x})\delta t_1 \end{aligned} \end{align}
δJ2=g[x(t1),x˙(t1)]δt1=g(x,x˙)δt1
将
δ
J
1
\delta J_1
δJ1 和
δ
J
2
\delta J_2
δJ2 代回 (6),有
δ
J
=
g
(
x
,
x
˙
)
δ
t
1
+
∫
t
0
t
1
∂
g
(
x
,
x
˙
)
∂
x
δ
x
+
∂
g
(
x
,
x
˙
)
∂
x
˙
δ
x
˙
d
t
\begin{align} \begin{aligned} \delta J &=g(x, \dot{x})\delta t_1+\int_{t_0}^{t_1}{\frac{\partial g(x,\dot{x})}{\partial x}\delta x + \frac{\partial g(x,\dot{x})}{\partial \dot{x}}\delta\dot{x}}dt \end{aligned} \end{align}
δJ=g(x,x˙)δt1+∫t0t1∂x∂g(x,x˙)δx+∂x˙∂g(x,x˙)δx˙dt
同理,对上式积分第二项应用分部积分,得到:
δ
J
=
g
(
x
,
x
˙
)
δ
t
1
+
∂
g
(
x
,
x
˙
)
∂
x
˙
δ
x
∣
t
0
t
1
+
∫
t
0
t
1
[
∂
g
(
x
,
x
˙
)
∂
x
−
d
d
t
∂
g
(
x
,
x
˙
)
∂
x
˙
]
δ
x
⋅
d
t
=
g
(
x
,
x
˙
)
δ
t
1
+
∂
g
(
x
,
x
˙
)
∂
x
˙
δ
x
(
t
1
)
+
∫
t
0
t
1
[
∂
g
(
x
,
x
˙
)
∂
x
−
d
d
t
∂
g
(
x
,
x
˙
)
∂
x
˙
]
δ
x
⋅
d
t
\begin{align} \begin{aligned} \delta J &=g(x, \dot{x})\delta t_1+\left. \frac{\partial g(x,\dot{x})}{\partial \dot{x}}\delta x\right|_{t_0}^{t_1}\\ &+\int_{t_0}^{t_1}{\left[\frac{\partial g(x,\dot{x})}{\partial x} -\frac{d}{dt} \frac{\partial g(x,\dot{x})}{\partial \dot{x}}\right]}\delta x\cdot dt\\ &=g(x, \dot{x})\delta t_1+ \frac{\partial g(x,\dot{x})}{\partial \dot{x}}\delta x(t_1)+\int_{t_0}^{t_1}{\left[\frac{\partial g(x,\dot{x})}{\partial x} -\frac{d}{dt} \frac{\partial g(x,\dot{x})}{\partial \dot{x}}\right]}\delta x\cdot dt\\ \end{aligned} \end{align}
δJ=g(x,x˙)δt1+∂x˙∂g(x,x˙)δx
t0t1+∫t0t1[∂x∂g(x,x˙)−dtd∂x˙∂g(x,x˙)]δx⋅dt=g(x,x˙)δt1+∂x˙∂g(x,x˙)δx(t1)+∫t0t1[∂x∂g(x,x˙)−dtd∂x˙∂g(x,x˙)]δx⋅dt
这个时候就用到上面的图了,通过上面的图可以发现,
δ
t
1
\delta t_1
δt1 与
δ
x
(
t
1
)
\delta x(t_1)
δx(t1) 是有关系的,这个关系是
δ
x
(
t
1
)
=
δ
x
1
−
x
˙
⋅
δ
t
1
\delta x(t_1)=\delta x_1 - \dot{x}\cdot\delta t_1
δx(t1)=δx1−x˙⋅δt1
代入 (11),进而有
δ
J
=
∫
t
0
t
1
[
∂
g
(
x
,
x
˙
)
∂
x
−
d
d
t
∂
g
(
x
,
x
˙
)
∂
x
˙
]
δ
x
⋅
d
t
+
∂
g
(
x
,
x
˙
)
∂
x
˙
δ
x
1
+
[
g
(
x
,
x
˙
)
−
∂
g
(
x
,
x
˙
)
∂
x
˙
x
˙
]
δ
t
1
\begin{align} \begin{aligned} \delta J &=\int_{t_0}^{t_1}{\left[\frac{\partial g(x,\dot{x})}{\partial x} -\frac{d}{dt} \frac{\partial g(x,\dot{x})}{\partial \dot{x}}\right]}\delta x\cdot dt\\ &+ \frac{\partial g(x,\dot{x})}{\partial \dot{x}}\delta x_1\\ &+\left[g(x, \dot{x})- \frac{\partial g(x,\dot{x})}{\partial \dot{x}}\dot{x}\right]\delta t_1 \end{aligned} \end{align}
δJ=∫t0t1[∂x∂g(x,x˙)−dtd∂x˙∂g(x,x˙)]δx⋅dt+∂x˙∂g(x,x˙)δx1+[g(x,x˙)−∂x˙∂g(x,x˙)x˙]δt1
当最优时,
δ
J
\delta J
δJ恒为零,这就很有意思了,那就说明不管怎么样,里面每一项必须都得是零才行。因此,同样地,有欧拉方程存在
∂
g
(
x
,
x
˙
)
∂
x
−
d
d
t
∂
g
(
x
,
x
˙
)
∂
x
˙
=
0
\frac{\partial g(x,\dot{x})}{\partial x} -\frac{d}{dt} \frac{\partial g(x,\dot{x})}{\partial \dot{x}}=0
∂x∂g(x,x˙)−dtd∂x˙∂g(x,x˙)=0
此外,还必须满足额外的条件
∂
g
(
x
,
x
˙
)
∂
x
˙
δ
x
1
+
[
g
(
x
,
x
˙
)
−
∂
g
(
x
,
x
˙
)
∂
x
˙
x
˙
]
δ
t
1
=
0
\frac{\partial g(x,\dot{x})}{\partial \dot{x}}\delta x_1+\left[g(x, \dot{x})- \frac{\partial g(x,\dot{x})}{\partial \dot{x}}\dot{x}\right]\delta t_1=0
∂x˙∂g(x,x˙)δx1+[g(x,x˙)−∂x˙∂g(x,x˙)x˙]δt1=0成立,这个条件被称为横截条件。
这里可以分两种情况讨论,当
x
1
x_1
x1 不受
t
1
t_1
t1 约束时,那么上式两部分就必须分别为零:
∂
g
(
x
,
x
˙
)
∂
x
˙
∣
x
=
x
1
=
0
,
g
(
x
1
,
x
˙
1
)
=
0
\left.\frac{\partial g(x,\dot{x})}{\partial \dot{x}}\right|_{x=x_1}=0,\quad g(x_1, \dot{x}_1)=0
∂x˙∂g(x,x˙)
x=x1=0,g(x1,x˙1)=0
若 曲线的末端
x
1
x_1
x1 是受另外一条曲线
x
1
=
γ
(
t
1
)
=
γ
1
x_1=\gamma(t_1)=\gamma_1
x1=γ(t1)=γ1 约束时,再参考第二张图
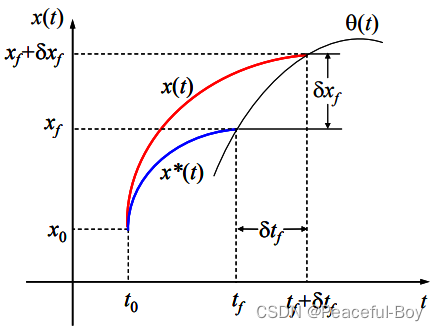
可以看出,
δ
x
1
=
θ
˙
(
t
1
)
δ
t
1
\delta x_1=\dot{\theta}(t_1)\delta t_1
δx1=θ˙(t1)δt1 (近似成立)。进而有横截条件:
g
(
x
1
,
x
˙
1
)
+
∂
g
(
x
,
x
˙
)
∂
x
˙
(
θ
˙
−
x
˙
)
∣
t
=
t
1
=
0
g(x_1,\dot{x}_1)+\left.\frac{\partial g(x,\dot{x})}{\partial \dot{x}}\left(\dot{\theta}-\dot{x}\right)\right|_{t=t_1}=0
g(x1,x˙1)+∂x˙∂g(x,x˙)(θ˙−x˙)
t=t1=0成立。
3. t 0 t_0 t0 固定, x 0 = x ( t 0 ) x_0=x(t_0) x0=x(t0) 固定, t 1 t_1 t1 固定, x 1 = x ( t 1 ) x_1=x(t_1) x1=x(t1) 自由
与第二种情况类似,欧拉方程还是要成立的,除此之外,由于
t
1
t_1
t1 已经被固定,所以一切有
δ
t
1
\delta t_1
δt1产生的变化都消失了,而且只能是
x
1
x_1
x1 自由。所以,式 (12)的第三行就消失了,那么横截条件就简化为
∂
g
(
x
,
x
˙
)
∂
x
˙
∣
x
=
x
1
=
0
\left.\frac{\partial g(x,\dot{x})}{\partial \dot{x}}\right|_{x=x_1}=0
∂x˙∂g(x,x˙)
x=x1=0
4. t 0 t_0 t0 固定, x 0 = x ( t 0 ) x_0=x(t_0) x0=x(t0) 固定, x 1 = x ( t 1 ) x_1=x(t_1) x1=x(t1) 固定, t 1 t_1 t1 自由
与第二种情况类似,欧拉方程还是要成立的,除此之外,由于
x
1
x_1
x1 已经被固定,所以一切有
δ
x
1
\delta x_1
δx1产生的变化都消失了,而且只能是
t
1
t_1
t1 自由。所以,式 (12)的第二行就消失了,那么横截条件就简化为
g
(
x
,
x
˙
)
−
∂
g
(
x
,
x
˙
)
∂
x
˙
x
˙
∣
x
=
x
1
=
0
\left.g(x, \dot{x})- \frac{\partial g(x,\dot{x})}{\partial \dot{x}}\dot{x}\right|_{x=x_1}=0
g(x,x˙)−∂x˙∂g(x,x˙)x˙
x=x1=0
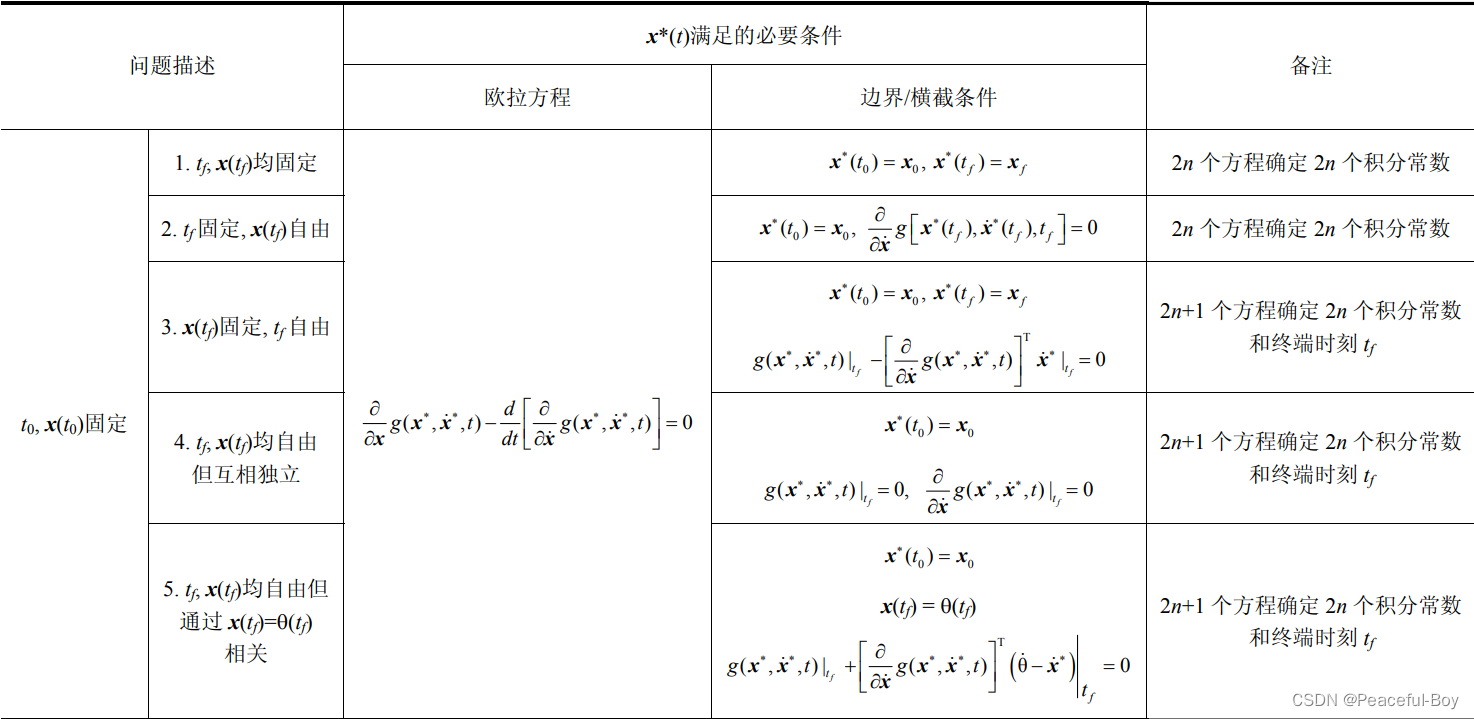
总结
直接贴图吧,表格太大了。
学习了这个工具之后,很多常见的小数学问题都有一个新视角去计算。比如两点之间为什么线段最短;找到某一定点到曲线方程的最短距离,等等。