ROS联合Webots之实现趣味机器人巡线刷圈
ROS联合Webots实现机器人视觉巡线刷圈
注意:
- 再学习本系列教程时,应该已经安装过ROS了并且需要有一些ROS的基本知识
ubuntu版本:20.04
webots版本:2021a
ros版本:noetic
前言
最近看到Youtube上大部分博主都在做巡线,笔者也来凑凑热闹。
此项目基于tianbot_mini机器人完成。
项目开源地址:tianbot_mini_webots
效果
小车已经设置为最高速度10
ROS控制方案
- 在功能包中添加opencv库
- 因为机器人要行使,所以首先要使能电机
- 要用到camera,所以使能camera
- 调整camera的前瞻角度
- 写opencv检测算法
- 更具PID控制算法控制两个轮子的速度
1. 配置功能包
1.1 配置CMakeLists.txt
自己找到相应位置添加
set(CMAKE_CXX_FLAGS "-std=c++11") # 调用OpenCV配置:C++版本为11
find_package(OpenCV 4.2 REQUIRED) # 找OpenCV 4.2 安装路径
include_directories(
${OpenCV_INCLUDE_DIRS} # 加载OpenCV 4.2 安装路径
)
add_executable(tianbot_line_follow src/tianbot_line_follow.cpp)
add_dependencies(tianbot_line_follow webots_ros_generate_messages_cpp)
target_link_libraries(tianbot_line_follow ${catkin_LIBRARIES})
target_link_libraries(tianbot_line_follow ${OpenCV_LIBS}) # 使用到Opencv库需要通过Opencv链接库
2. 使能电机
笔者这边写了tianbot_velocity.cpp来使能左右电机,其主要代码如下所示:
// 初始化电机
for (int i = 0; i < NMOTORS; ++i) {
// 速度控制时position设置为缺省值INFINITY(必须要这一步,否则webots会报错)
set_position_client = n->serviceClient<webots_ros::set_float>(string("/tianbot_mini/") + string(motorNames[i]) + string("/set_position"));
set_position_srv.request.value = INFINITY;
if (set_position_client.call(set_position_srv) && set_position_srv.response.success)
ROS_INFO("Position set to INFINITY for motor %s.", motorNames[i]);
else
ROS_ERROR("Failed to call service set_position on motor %s.", motorNames[i]);
// velocity初始速度设置为0
set_velocity_client = n->serviceClient<webots_ros::set_float>(string("/tianbot_mini/") + string(motorNames[i]) + string("/set_velocity"));
set_velocity_srv.request.value = 0.0;
if (set_velocity_client.call(set_velocity_srv) && set_velocity_srv.response.success == 1)
ROS_INFO("Velocity set to 0.0 for motor %s.", motorNames[i]);
else
ROS_ERROR("Failed to call service set_velocity on motor %s.", motorNames[i]);
}
3. 使能camera
创建一个机器人巡线主程序tianbot_line_follow.cpp,使能camera主要代码如下:
// 使能摄像头
ros::ServiceClient set_camera_client;
webots_ros::set_int camera_srv;
ros::Subscriber sub_camera_img;
set_camera_client = n->serviceClient<webots_ros::set_int>(string(ROBOT_NAME)+string("camera/enable"));
camera_srv.request.value = TIME_STEP;
// 此代码等同于rosservice call /tianbot_mini/camera/enable 32
if (set_camera_client.call(camera_srv) && camera_srv.response.success) {
// 使能成功立即订阅camera发布的topic
sub_camera_img = n->subscribe(string(ROBOT_NAME)+string("camera/image"), 1, CameraCallback);
ROS_INFO("Camera enabled.");
} else {
if (!camera_srv.response.success)
ROS_ERROR("Failed to enable Camera.");
return 1;
}
4. 调整camera
-
首先在Robot机器人主节点下的children下添加camera节点
-
给camera节点配置shape为Box,size设置为(0.02 0.009 0.01)
-
使用ctrl+F9显示摄像头检测范围,如下图所示
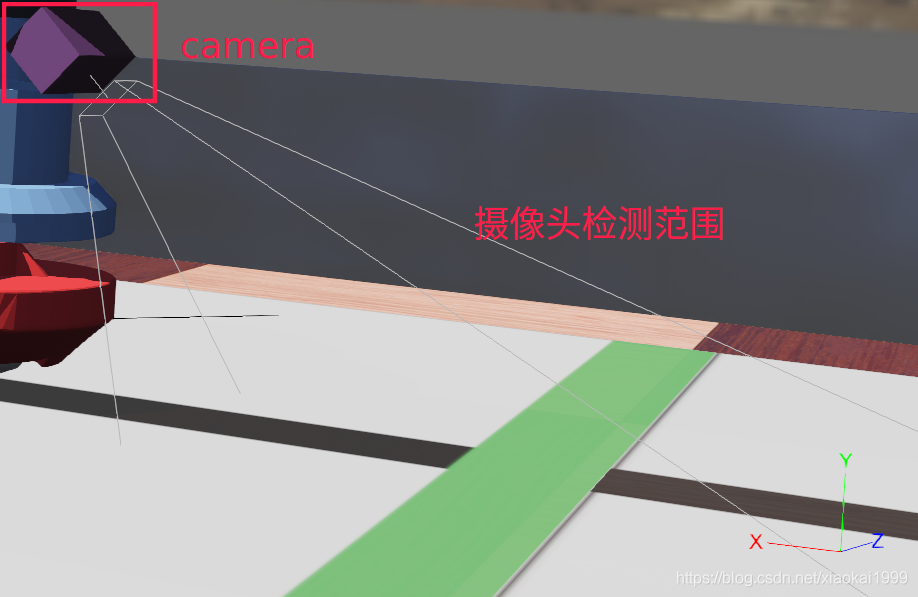
-
有了显示摄像头的检测范围,就能很快速的调整camera的前瞻角度,这个更具自己算法作相应的调整,笔者这边的角度参数为(0.357 -0.357 -0.863)
4.1 opencv获取图像
上面的使能操作中已经订阅了camera发布的图像topic,接下来只需要写camera回调函数来获取图像数。
#include <opencv2/opencv.hpp>
using namespace cv; // opencv
void CameraCallback(const sensor_msgs::Image::ConstPtr &value){
// 将webots提供的uchar格式数据转换成Mat
Mat img_rgb = Mat(value->data).clone().reshape(4, 64);
Mat img;
img = ImageProcessFun(img_rgb);
FindPoints(img);
}
5. opencv检测算法
之前笔者写过一篇基于v-rep仿真软件的视觉寻线算法,想了解的同学可以移步至:
疫情让我使用V-rep仿真(结合pythonAPI)实现机器人视觉巡线+pid调速
这次的算法相比较于上次的算法更简单,适用于这种简单的巡线场景。
5.1 算法解析
将获取到的(6464)大小的图像,截取底部(2464)大小的区域用于识别,减少识别面积,提高运算速度。
将图像再按3快均匀划分,分为前,中,后三块,如下图所示:
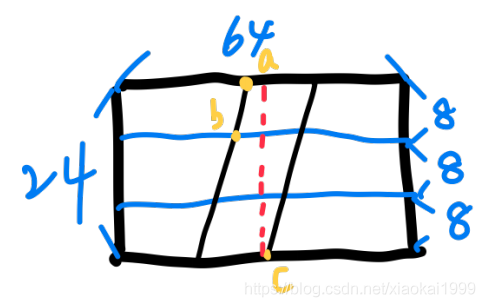
设置左点X,右点Y,中点M。X从左往右检测,Y从右往左检测,M则为X点和Y点的中点。
首先检测前块左边线的点,称为左点a,如果存在X=a
否则检测中块左边线的点,成为左点b,如果存在X=b
如果都不存在,则检测后块左边线的点,同上。找到了X就要找Y,直接从右往左检测后块右边线点c,如果存在Y=c。
否则判断为偏离路径。
M = (X+Y)/2
M(f,g)和中心线计算行里的偏移距离,将此值带入PID求出两轮的速度。
5.2 图像处理
首先想要计算,必须经过一系列的图像处理,让图像更方便的进行计算。
void ImageProcessFun(Mat img_rgb){
img_rgb(Range(40, 64),Range(0, 64)).copyTo(img_gray); //选择感兴趣区域
cvtColor(img_gray, img_gray, COLOR_BGR2GRAY); // 将图像转换为灰度图像
threshold(img_gray, img, 100, 255, THRESH_BINARY); // 对感兴趣区域进行二值化操作
Canny(img, img, 20, 40); // 由于仿真没有额外复杂环境,使用Canny边缘检测
}
最后效果如下所示:

[原图]

[处理后的图]
5.3 找出关键点
void FindPoints(Mat img){
Point left_point, right_point, middle_point;// 左上一点,右下一点,求出中点
int flag = 1;// 点数
// 找出左边线
while (flag <= 4){
for (int i = 0; i < 64; i++){
// 在前块中查找左边线的点
if (flag == 1){
if((int)img.at<uchar>(0, i) == 255){
left_point.x = i;
left_point.y = 0;
cout<<"left_point="<<left_point<<endl;
flag = 4;
break;
}
}
// 在中快中查找左边线的点
else if (flag == 2){
if((int)img.at<uchar>(9, i) == 255){
left_point.x = i;
left_point.y = 9;
cout<<"left_point="<<left_point<<endl;
flag = 4;
break;
}
}
else{
cout<<"已超出范围"<<endl;
flag = 6;
break;
}
}
flag++;
}
// 找到左边线后求解右边线
for (int i = 63; i >= 0; i--){
if((int)img.at<uchar>(23, i) == 255){
right_point.x = i;
right_point.y = 23;
cout<<"right_point="<<right_point<<endl;
break;
}
}
//计算出中间点
middle_point.x = left_point.x + (right_point.x - left_point.x)/2;
middle_point.y = 12;// 固定行高
cout<<"middle_point="<<middle_point<<endl;
line(img, Point(32,0), Point(32,24), Scalar(255));// 在感兴趣区域中绘制中心线
line(img, middle_point, middle_point, Scalar(255),5);// 画出中心点
}
6. PID输出速度
使用位置式PID,网上都有教程,自行查找。
struct pid
{
float pid_setValue; // 设置值
float pid_actualValue; // 当前值
float Kp;
float Ki;
float Kd;
float err; // 偏差
float last_err; // 上一次的偏差
float speed;
float T; // 更新周期
float integral; // 累积误差
}_pid;
void pid_init(float Kp,float Ki,float Kd){
_pid.pid_setValue = 0.0;
_pid.pid_actualValue = 0.0;
_pid.Kp = Kp;
_pid.Ki = Ki;
_pid.Kd = Kd;
_pid.err = 0.0;
_pid.last_err = 0.0;
_pid.speed = 0.0;
_pid.T = .0 ;
_pid.integral = 0.0;
}
float pid_run(float value){
_pid.pid_setValue = value;
_pid.err = _pid.pid_setValue - _pid.pid_actualValue;
_pid.integral = _pid.integral + _pid.err;
_pid.speed = _pid.err * _pid.Kp + _pid.integral *_pid.T * _pid.Ki + (_pid.err - _pid.last_err) * _pid.Kd;
_pid.last_err = _pid.err;
_pid.pid_actualValue = _pid.speed;
return _pid.pid_actualValue;
}
pid_run((float)(middle_point.x - 32))/2.0;// 输入差值,输出左右轮的速度差
7. 速度更新
void updateSpeed(Point middle_point) {
double speed_diff=0.0;// 定义速度差变量
speed_diff = pid_run((float)(middle_point.x - 32))/2.0;// 计算速度差
cout<<"speed_diff="<<speed_diff<<endl;
speeds[0] = speed_diff;
speeds[1] = -speed_diff;
// 确定基准速度(10为最大)
if (abs(middle_point.x - 32) <= 2){
cspeed=9.0;// 直行速度为9
}else if (abs(middle_point.x - 32) > 2){
cspeed=7.0;// 弯道速度为7
}
cout<<"leftspeed="<<speeds[0]<<endl;
cout<<"rightspeed="<<speeds[1]<<endl;
for (int i = 0; i < NMOTORS; ++i) {
// 发送给webots更新机器人速度
set_velocity_client = n->serviceClient<webots_ros::set_float>(string("/tianbot_mini/") + string(motorNames[i]) + string("/set_velocity"));
set_velocity_srv.request.value = speeds[i]+cspeed;// 速度差+基准速度
set_velocity_client.call(set_velocity_srv);
}
}
结语
本文也是基于笔者的学习和使用经验总结的,主观性较强,如果有哪些不对的地方或者不明白的地方,欢迎评论区留言交流~
为了能和读者进一步讨论问题,建立了一个微信群,方便给大家解答问题,也可以一起讨论问题。
加群链接
✌Bye