模型推导,以隐极式电机为例:
u
α
=
R
s
i
s
α
+
L
1
d
i
s
α
d
t
+
p
ψ
⃗
f
cos
θ
r
u
β
=
R
s
i
s
β
+
L
1
d
i
s
β
d
t
+
p
ψ
⃗
f
sin
θ
r
u
⃗
α
β
=
R
s
i
⃗
s
α
β
+
L
1
p
i
⃗
α
β
+
p
ψ
⃗
f
p
ψ
⃗
f
=
u
⃗
α
β
−
R
s
i
⃗
s
α
β
−
L
1
p
i
⃗
α
β
ψ
⃗
f
=
ψ
f
e
j
ω
e
t
p
ψ
⃗
f
=
d
ψ
f
d
t
e
j
ω
e
t
+
j
ω
e
ψ
f
e
j
ω
e
t
d
ψ
f
d
t
e
j
ω
e
t
+
j
ω
e
ψ
f
e
j
ω
e
t
=
u
⃗
α
β
−
R
s
i
⃗
s
α
β
−
L
1
p
i
⃗
α
β
d
ψ
f
d
t
+
j
ω
e
ψ
f
=
(
u
⃗
α
β
−
R
s
i
⃗
s
α
β
−
L
1
p
i
⃗
α
β
)
e
−
j
ω
e
t
u_{\alpha}=R_si_{s\alpha}+L_1\frac{di_{s\alpha}}{dt}+p\vec{\psi}_f\cos \theta _r \\ u_{\beta}=R_si_{s\beta}+L_1\frac{di_{s\beta}}{dt}+p\vec{\psi}_f\sin \theta _r \\ \vec{u}_{\alpha \beta}=R_s\vec{i}_{s\alpha \beta}+L_1p\vec{i}_{\alpha \beta}+p\vec{\psi}_f \\ p\vec{\psi}_f=\vec{u}_{\alpha \beta}-R_s\vec{i}_{s\alpha \beta}-L_1p\vec{i}_{\alpha \beta} \\ \vec{\psi}_f=\psi _fe^{j\omega _et} \\ p\vec{\psi}_f=\frac{d\psi _f}{dt}e^{j\omega _et}+j\omega _e\psi _fe^{j\omega _et} \\ \frac{d\psi _f}{dt}e^{j\omega _et}+j\omega _e\psi _fe^{j\omega _et}=\vec{u}_{\alpha \beta}-R_s\vec{i}_{s\alpha \beta}-L_1p\vec{i}_{\alpha \beta} \\ \frac{d\psi _f}{dt}+j\omega _e\psi _f=\left( \vec{u}_{\alpha \beta}-R_s\vec{i}_{s\alpha \beta}-L_1p\vec{i}_{\alpha \beta} \right) e^{-j\omega _et}
uα=Rsisα+L1dtdisα+pψfcosθruβ=Rsisβ+L1dtdisβ+pψfsinθruαβ=Rsisαβ+L1piαβ+pψfpψf=uαβ−Rsisαβ−L1piαβψf=ψfejωetpψf=dtdψfejωet+jωeψfejωetdtdψfejωet+jωeψfejωet=uαβ−Rsisαβ−L1piαβdtdψf+jωeψf=(uαβ−Rsisαβ−L1piαβ)e−jωet
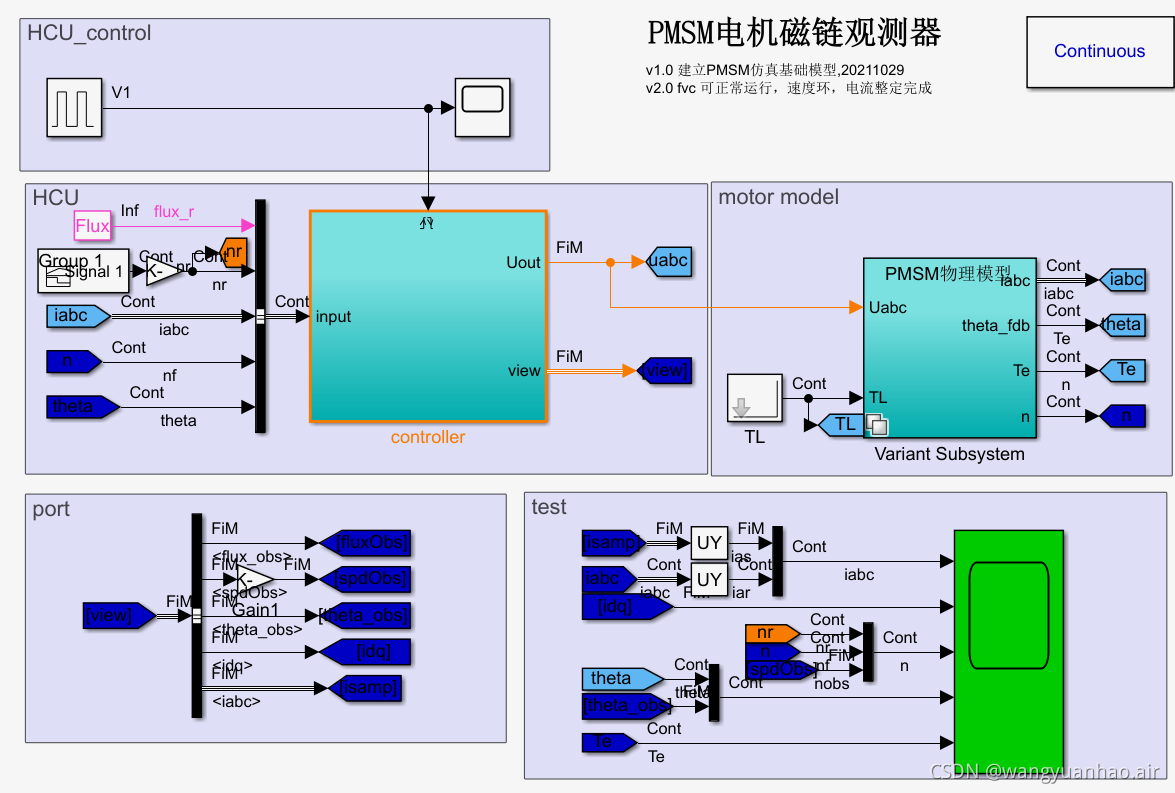
搭建仿真模型:
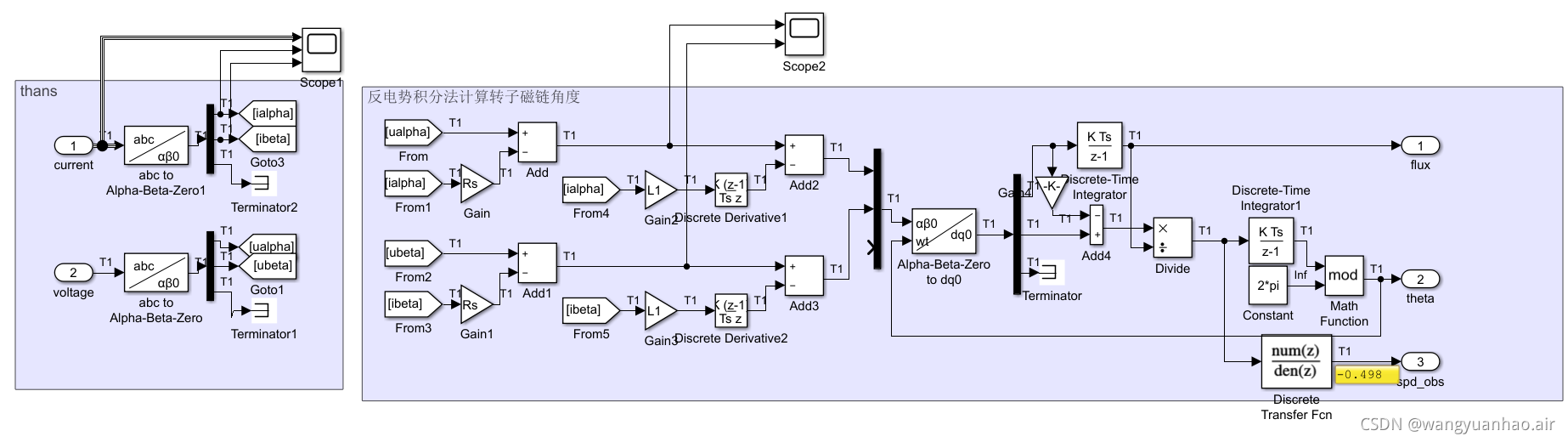
改进反电势模型如下:
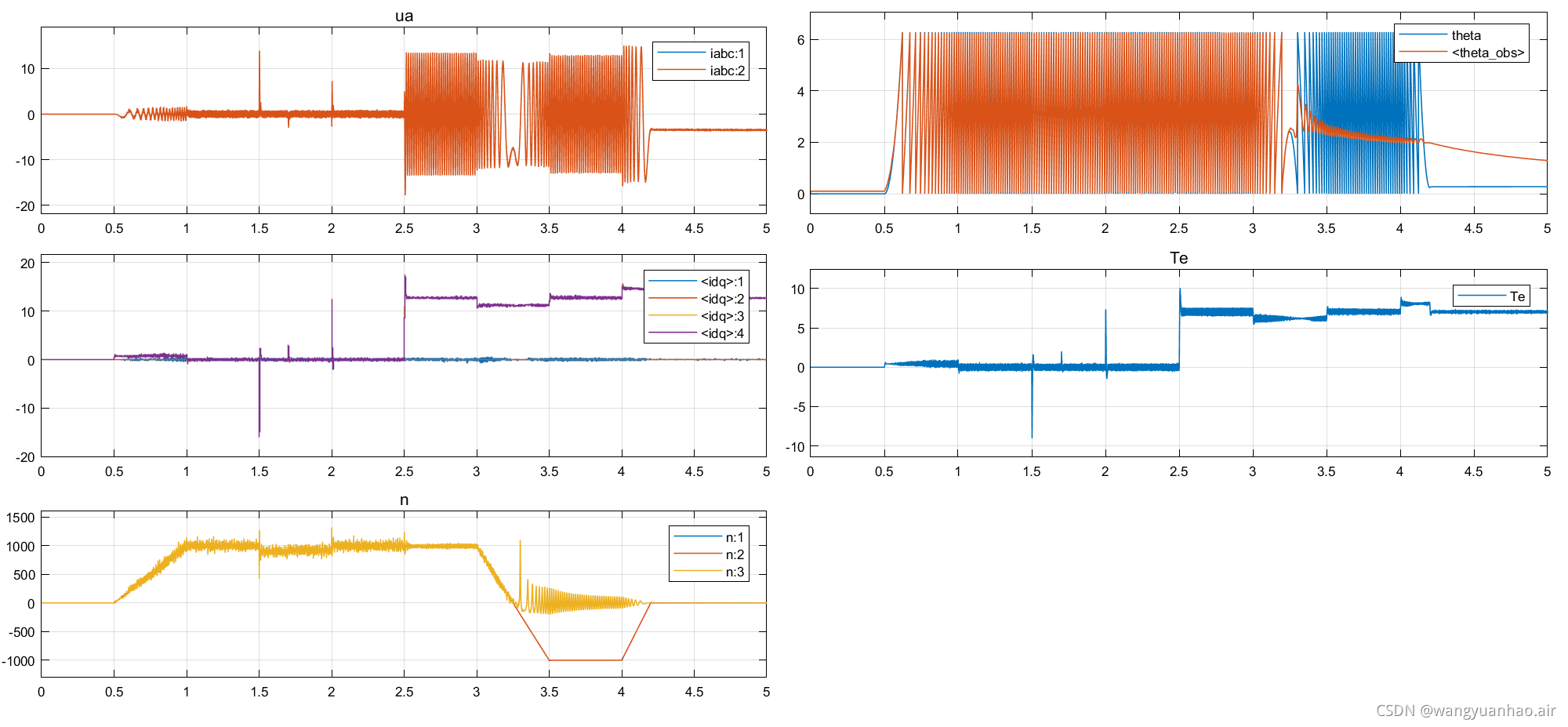
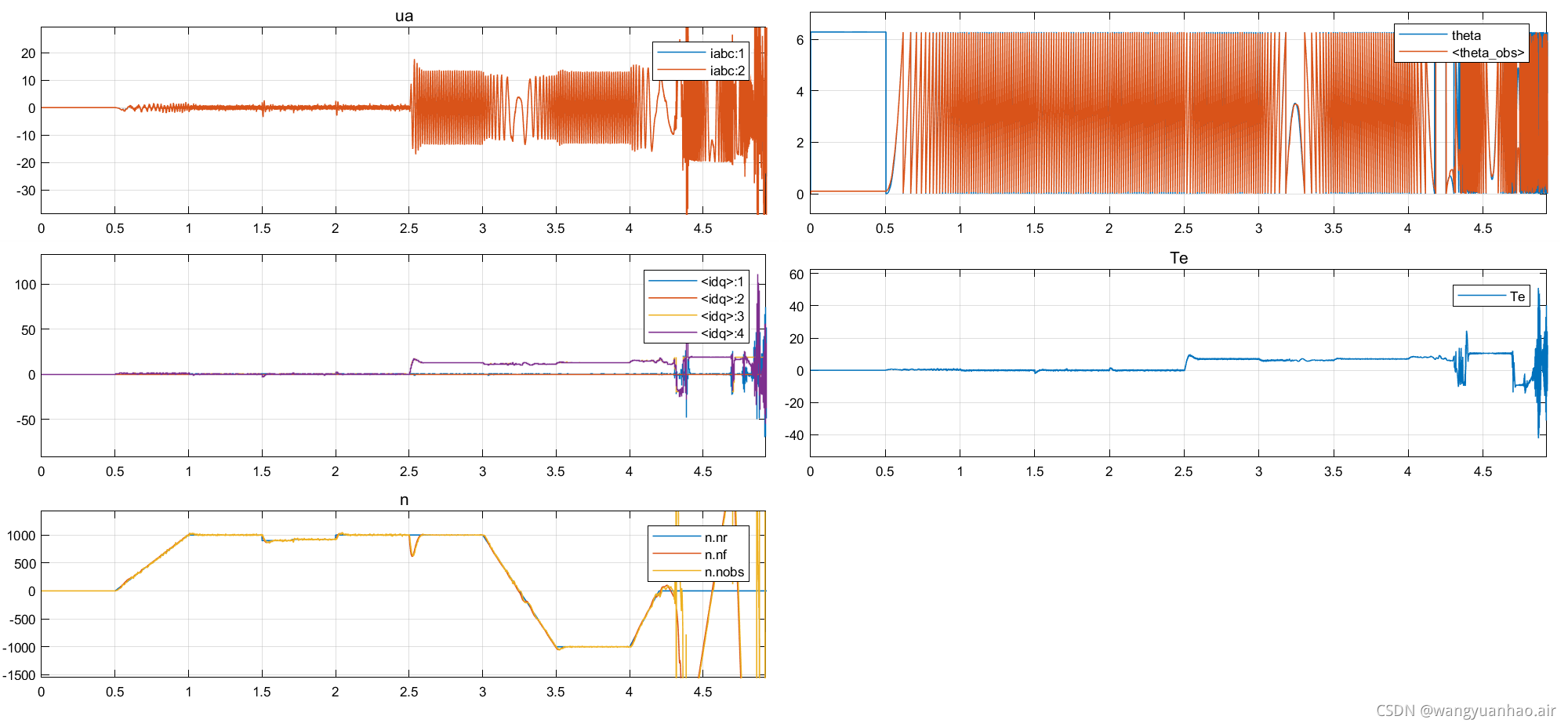
仿真结果: 存在的问题: 转速为负时,观测器发散。 问题分析: 根据反电势计算公式:
d
ψ
f
d
t
+
j
ω
e
ψ
f
=
(
u
⃗
α
β
−
R
s
i
⃗
s
α
β
−
L
1
p
i
⃗
α
β
)
e
−
j
ω
e
t
\frac{d\psi _f}{dt}+j\omega _e\psi _f=\left( \vec{u}_{\alpha \beta}-R_s\vec{i}_{s\alpha \beta}-L_1p\vec{i}_{\alpha \beta} \right) e^{-j\omega _et}
dtdψf+jωeψf=(uαβ−Rsisαβ−L1piαβ)e−jωet
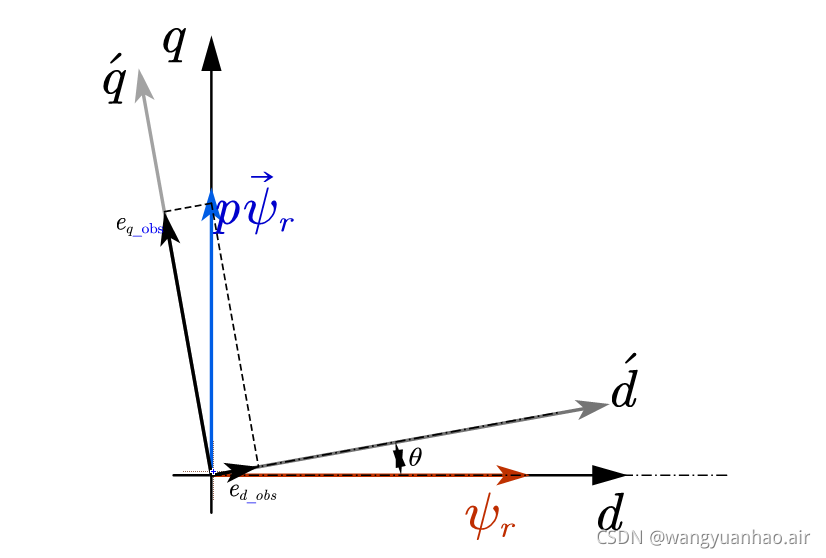
ed–eq前馈修正系数设计:
k
o
p
t
∗
e
d
∗
s
i
g
n
(
n
o
b
s
)
k_{opt}*e_d*sign\left( n_{obs} \right)
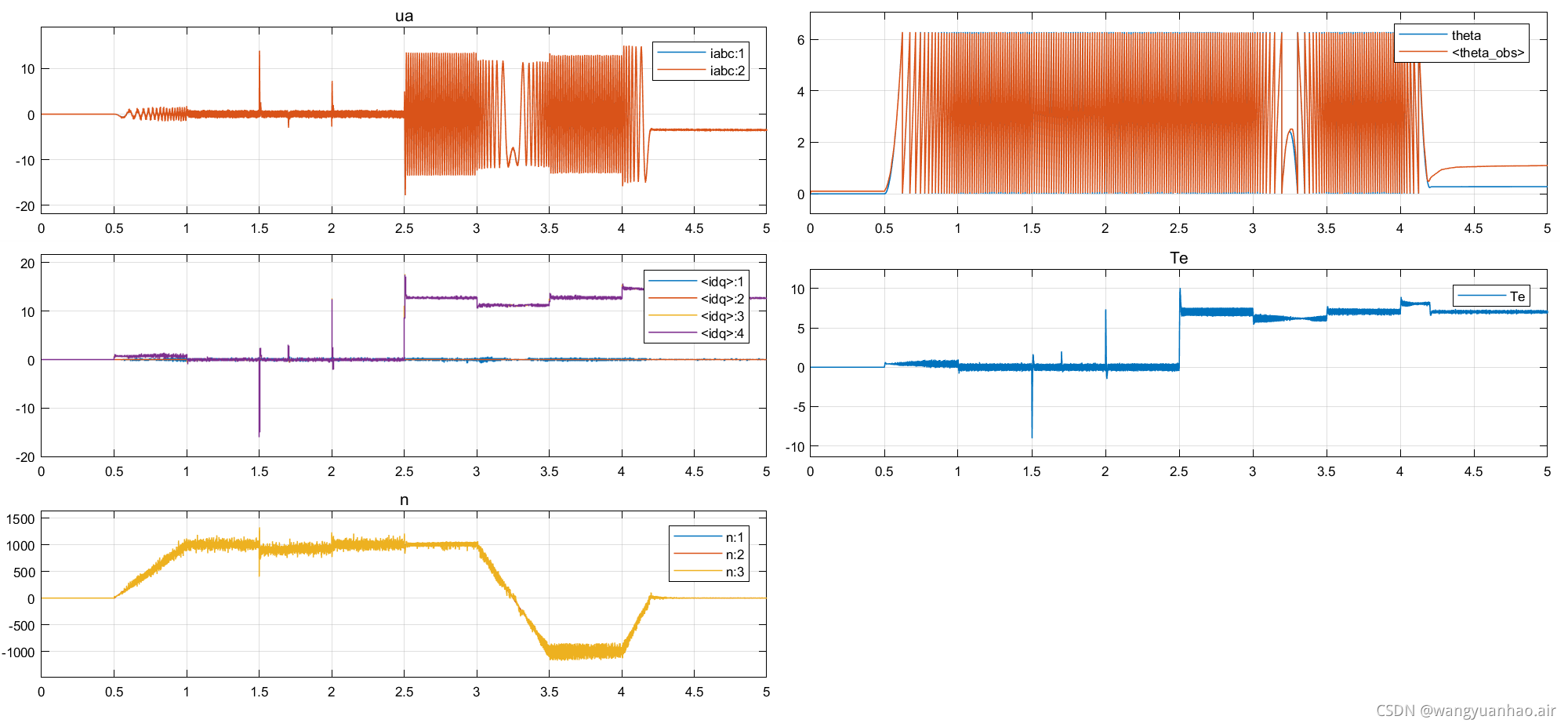
kopt∗ed∗sign(nobs) 当转速为负时,将反馈项转变为正值,加速eq的绝对值减小,从而迅速减慢we的顺时针旋转速度,d轴将减慢旋转速度,保证快速收敛。 采用该修正方式后:正反转观测正常。