matlab绘制栅格地图
学习了一下栅格地图在matlib中的表示方法,其实和很多都是差不多的。
参考
清除命令
% clc:清除命令窗口的内容,对工作环境中的全部变量无任何影响
% close all:关闭所有的Figure窗口
% clear all:清除工作空间的所有变量,函数,和MEX文件
clc
clear
close all
%% 构建颜色MAP图
cmap = [1 1 1; ... % 1-白色-空地
0 0 0; ... % 2-黑色-静态障碍
1 0 0; ... % 3-红色-动态障碍
1 1 0;... % 4-黄色-起始点
1 0 1;... % 5-品红-目标点
0 1 0; ... % 6-绿色-到目标点的规划路径
0 1 1]; % 7-青色-动态规划的路径
% 构建颜色MAP图
colormap(cmap);
color map函数:
将上面的分类创建成颜色,对于矩阵cmap来说,矩阵是通过从1开始的序列进行编号的:
cmap(1,2)表示第一行第二列。colormap将cmap存成了7种颜色。每一个颜色对应一个数值
%% 构建栅格地图场景
% 栅格界面大小:行数和列数
rows = 10;
cols = 10;
% 定义栅格地图全域,并初始化空白区域
field = ones(rows, cols);
这个什么好说的,就是field是一个10*10的矩阵
% 障碍物区域
obsRate = 0.3;
obsNum = floor(rows*cols*obsRate);
obsIndex = randi([1,rows*cols],obsNum,1);
field(obsIndex) = 2;
这里稍微多一些,obsRate是障碍物比例,用floor来表示出:30?
obsIndex用randi表示,randi随机取1到100的30行1列的矩阵
filed是一个10*10的矩阵
filed(obsIndex)表示???
% 起始点和目标点
startPos = 2;
goalPos = rows*cols-2;
field(startPos) = 4;
field(goalPos) = 5;
%% 画栅格图
image(1.5,1.5,field);
#0.5也可以
grid on;
#打开grid
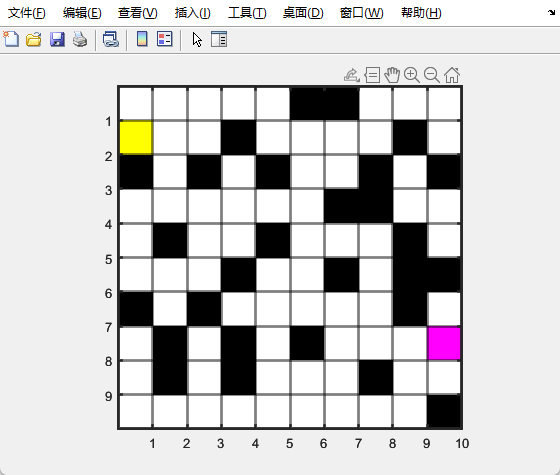
set(gca,‘gridline’,‘-’,‘gridcolor’,‘k’,‘linewidth’,2,‘GridAlpha’,0.5);
set(gca,‘xtick’,1:cols+1,‘ytick’,1:rows+1);
% set(gca)函数用处表示很大了,第一行调整了线框,第二行重新定义xy轴的刻度
% set(gca,’xtick’,[],’ytick’,[]) %同时去掉x轴和y轴的刻度
有他们:
没有他们:
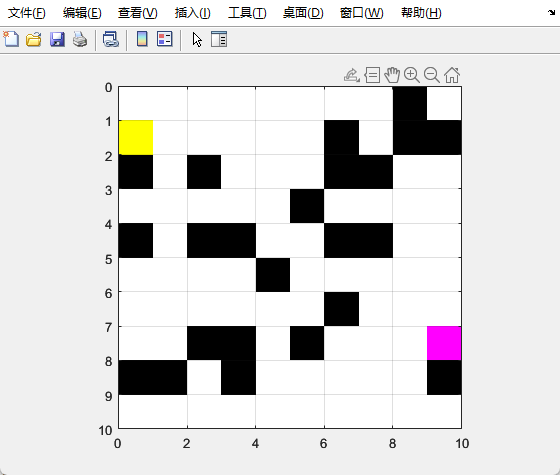
感觉没有太多的区别
axis image;
总体代码如下:
% clc:清除命令窗口的内容,对工作环境中的全部变量无任何影响
% close:关闭当前的Figure窗口
% close all:关闭所有的Figure窗口
% clear:清除工作空间的所有变量
% clear all:清除工作空间的所有变量,函数,和MEX文件
clc
clear
close all
cmap = [1 1 1;
0 0 0;
1 0 0;
1 1 0;
1 0 1;
0 1 0;
0 1 1];
% 构建颜色MAP图
colormap(cmap);
%% 构建栅格地图场景
% 栅格界面大小:行数和列数
rows = 10;
cols = 10;
% 定义栅格地图全域,并初始化空白区域
field = ones(rows, cols);
% 障碍物区域
obsRate = 0.3;
obsNum = floor(rows*cols*obsRate);
obsIndex = randi([1,rows*cols],obsNum,1);
field(obsIndex) = 2;
% 起始点和目标点
startPos = 2;
goalPos = rows*cols-2;
field(startPos) = 4;
field(goalPos) = 5;
%% 画栅格图
image(1.5,1.5,field);
grid on;
set(gca,'gridline','-','gridcolor','k','linewidth',2,'GridAlpha',0.5);
set(gca,'xtick',1:cols+1,'ytick',1:rows+1);
axis image;
注意,脚本名称不要是grid.m,会报错的grid on;