Andoid 仿自如裸眼 3D 效果
目录
前言
前段时间自如技术团队发布了一篇名为《自如客APP裸眼3D效果的实现》的技术分享文章,简述了通过将图层分为前中后景,监听手机倾斜角度,再根据倾斜角度反向移动前后景,实现类似裸眼 3D 的效果。 该文章中已将思路与原理讲述清楚,抱着好奇心尝试仿现了一下。
1.自如的思路分析探究

UI 层面上:将普通的 2D 图像切割出 背景、中景、前景 三个部分

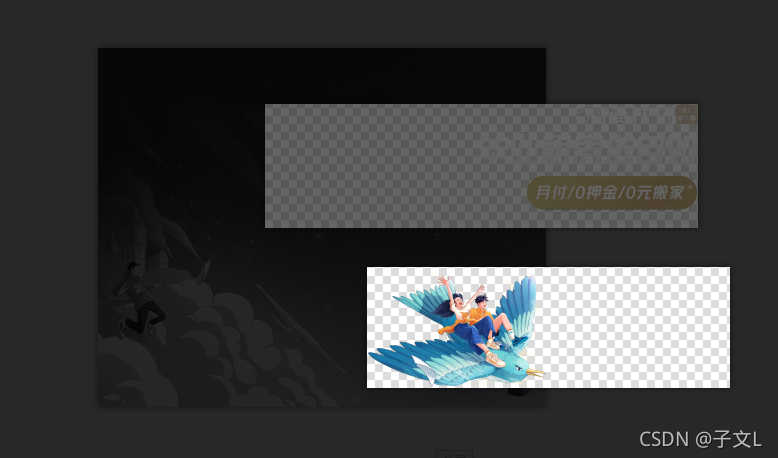
( “ 切割 ” 这部分操作当然是交给专业的 UI 同事来进行)
技术层面上:通过 Android 中的 磁场传感器 和 加速度传感器 监听设备的倾斜角度,保持 中景 不动,根据倾斜角度反向移动 背景 和 前景 ,将 2D 图像转化为景深效果,呈现出类似裸眼 3D 的视觉效果。
思路上就是这么清晰和简单,需求如下:
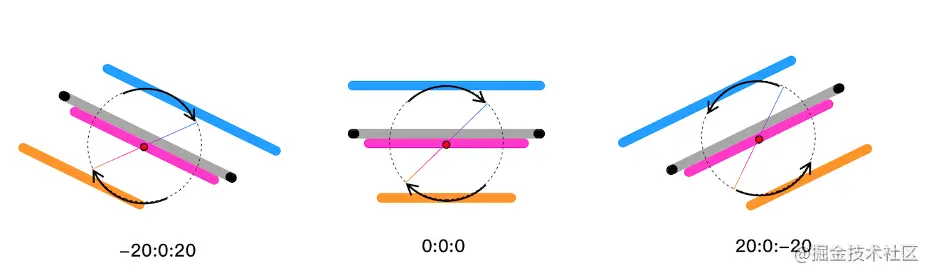
根据设备倾斜角度 平稳移动 前后景,实现裸眼 3D 效果
其中前后景在 Y 轴上的移动范围和速度均比 X 轴小和慢
2.具体实现
2.1 实现效果

2.2 具体实现
2.2.1 自定义 GravityRotationImageView :
1.继承于 ImageView ,内部实现 Scroller
2.提供自定义属性 isBack 区分该 View 用作前景还是后景,前后景移动方向不同,且后景 ImageView 的填充应存在一定的放大倍数
/**
* 设置当前 view 为前景或后景
* @param isBack true 后景 ; false 前景
*/
fun isBack(isBack: Boolean) {
/**
* 判断该 view 用作前景还是后景
* 后景则需调整放大倍数使内容滚动时不会出现白边
* 并根据前后景记录对应的滚动方向
*/
if (isBack) {
mDirection = DIRECTION_BACK
scaleType = ScaleType.CENTER_CROP
scaleX = 1.1f
scaleY = 1.2f
} else {
mDirection = DIRECTION_FRONT
}
}3.提供 handleSensorChangedValues 方法,该方法中根据得到的传感器数据计算倾斜角度,过滤抖动(角度变化过小/过大),并得到需要移动的距离,最后通过 Scroller 辅助移动
/**
* 处理传感器得到的数据,过滤后再根据倾斜角度移动当前 view
* 旋转移动过程中,前景后景随旋转角度偏移
*/
internal fun handleSensorChangedValues(
gravity: FloatArray,
geomagnetic: FloatArray,
maxMovingRange: Float = MOVING_RANGE_DEFAULT
) {
if (maxMovingRange != MOVING_RANGE_DEFAULT) {
mMaxMovingRange = dip2px(this.context, maxMovingRange)
}
//旋转角度值集
val orientationValues = FloatArray(3)
//旋转矩阵
val rotationMatrix = FloatArray(9)
SensorManager.getRotationMatrix(
rotationMatrix,
null,
gravity,
geomagnetic
)
SensorManager.getOrientation(rotationMatrix, orientationValues)
// z 轴的偏转角度
orientationValues[0] = Math.toDegrees(orientationValues[0].toDouble()).toFloat()
// x 轴的偏转角度
orientationValues[1] = Math.toDegrees(orientationValues[1].toDouble()).toFloat()
// y 轴的偏转角度
orientationValues[2] = Math.toDegrees(orientationValues[2].toDouble()).toFloat()
val newAngleX = orientationValues[1].toInt()
val newAngleY = orientationValues[2].toInt()
// x 、 y 轴角度变化值
val rotationAngleXChangeValue = abs(newAngleX - rotationAngleX)
val rotationAngleYChangeValue = abs(newAngleY - rotationAngleY)
var targetX = mScroller.finalX
var targetY = mScroller.finalY
if (rotationAngleYChangeValue in (RESPONSE_ANGLE_CHANGE_MIN + 1) until RESPONSE_ANGLE_CHANGE_MAX
|| rotationAngleXChangeValue in (RESPONSE_ANGLE_CHANGE_MIN + 1) until RESPONSE_ANGLE_CHANGE_MAX
) {
if (newAngleX <= 0 && newAngleX > -MAX_ROTATION_ANGLE || newAngleX in 1 until MAX_ROTATION_ANGLE) {
targetY = mMaxMovingRange * -mDirection * newAngleX / MAX_ROTATION_ANGLE_Y
}
if (newAngleY <= 0 && newAngleY > -MAX_ROTATION_ANGLE || newAngleY in 1 until MAX_ROTATION_ANGLE) {
targetX = mMaxMovingRange * mDirection * newAngleY / MAX_ROTATION_ANGLE
}
val dx = targetX - scrollX
val dy = targetY - scrollY
smoothScroll(dx, dy)
//更新角度
rotationAngleX = newAngleX
rotationAngleY = newAngleY
}
}2.2.2 自定义帮助类 GravityRotationHelper :
1.构造方法中得到已实现 LifecycleOwner 的 context 对象,通过 Lifecycle 特性在 context 对象的相应生命周期中进行 加速度传感器 和 磁场传感器 的注册与反注册
init {
if (context is LifecycleOwner) {
//获取传感器管理类实例
mSensorManager = context.getSystemService(Context.SENSOR_SERVICE) as SensorManager
//加速度传感器实例
val accelerationSensor = mSensorManager?.getDefaultSensor(Sensor.TYPE_ACCELEROMETER)
//磁场传感器
val magneticSensor = mSensorManager?.getDefaultSensor(Sensor.TYPE_MAGNETIC_FIELD)
context.lifecycle.addObserver(object : LifecycleObserver {
@OnLifecycleEvent(Lifecycle.Event.ON_RESUME)
fun onResume(@NotNull owner: LifecycleOwner) {
//注册监听
mSensorManager?.registerListener(
mSensorEventListener,
accelerationSensor,
SensorManager.SENSOR_DELAY_GAME
)
mSensorManager?.registerListener(
mSensorEventListener,
magneticSensor,
SensorManager.SENSOR_DELAY_GAME
)
}
@OnLifecycleEvent(Lifecycle.Event.ON_PAUSE)
fun onPause(@NotNull owner: LifecycleOwner) {
mSensorManager?.unregisterListener(mSensorEventListener)
}
})
} else {
Log.e(
"GravityRotationHelper",
"GravityRotationHelper init error : context is LifecycleOwner = false "
)
}
}2.提供 attachViews 方法,得到外部需要实现裸眼 3D 效果的前景与后景 View ,旧持有前景后景 View 不为空时,记录并重置对应 scroll 值
/**
* 添加需要实现裸眼 3D 效果的视图组
* 旋转移动过程中,前景后景随旋转角度偏移
* @param frontView 前景
* @param backView 后景
* @param maxMovingRange 最大可移动范围 dp
*/
fun attachViews(
frontView: GravityRotationImageView,
backView: GravityRotationImageView,
maxMovingRange: Float = MOVING_RANGE_DEFAULT
) {
//旧持有前景后景 View 不为空时,记录并重置对应 scroll 值
val oldFrontViewScrollX = mFrontView?.scrollX ?: 0
val oldFrontViewScrollY = mFrontView?.scrollY ?: 0
val oldBackViewScrollX = mBackView?.scrollX ?: 0
val oldBackViewScrollY = mBackView?.scrollY ?: 0
val oldRotationAngleX = mFrontView?.rotationAngleX ?: 0
val oldRotationAngleY = mFrontView?.rotationAngleY ?: 0
mFrontView = frontView
mBackView = backView
mFrontView?.rotationAngleX = oldRotationAngleX
mFrontView?.rotationAngleY = oldRotationAngleY
mBackView?.rotationAngleX = oldRotationAngleX
mBackView?.rotationAngleY = oldRotationAngleY
//继承上一组前景后景 View 的 scroll 值
mFrontView?.scrollTo(oldFrontViewScrollX, oldFrontViewScrollY)
mBackView?.scrollTo(oldBackViewScrollX, oldBackViewScrollY)
mMaxMovingRange = maxMovingRange
}3.传感器数值变化时调用前后景 View 的 handleSensorChangedValues 方法进行移动
private var mSensorEventListener = object : SensorEventListener {
override fun onSensorChanged(event: SensorEvent) {
when (event.sensor.type) {
Sensor.TYPE_ACCELEROMETER -> {
//加速度
mAccelerationValues = event.values
handleAccelerometerAndMagneticData()
}
Sensor.TYPE_MAGNETIC_FIELD -> {
//磁场
mMagneticValues = event.values
handleAccelerometerAndMagneticData()
}
}
}
override fun onAccuracyChanged(sensor: Sensor?, accuracy: Int) {
}
}
private fun handleAccelerometerAndMagneticData() {
if (mAccelerationValues != null && mMagneticValues != null) {
if (mFrontView != null && mBackView !== null) {
mFrontView?.handleSensorChangedValues(
mAccelerationValues!!,
mMagneticValues!!,
mMaxMovingRange
)
mBackView?.handleSensorChangedValues(
mAccelerationValues!!,
mMagneticValues!!,
mMaxMovingRange
)
}
}
}2.3 使用步骤
1.复制 Demo 中的 GravityRotationHelper 和 GravityRotationImageView 以及自定义属性 attrs 到项目中
2.布局中使用 GravityRotationImageView 作为需要实现 3D 效果的前景与后景 View
<androidx.constraintlayout.widget.ConstraintLayout xmlns:android="http://schemas.android.com/apk/res/android"
xmlns:app="http://schemas.android.com/apk/res-auto"
android:layout_width="match_parent"
android:layout_height="match_parent"
android:clipChildren="false">
<com.ziwenl.library.GravityRotationImageView
android:id="@+id/iv_back"
android:layout_width="match_parent"
android:layout_height="250dp"
android:paddingBottom="40dp"
android:src="@mipmap/banner_a_back"
app:isBack="true"
app:layout_constraintEnd_toEndOf="parent"
app:layout_constraintStart_toStartOf="parent"
app:layout_constraintTop_toTopOf="parent" />
<FrameLayout
android:layout_width="wrap_content"
android:layout_height="wrap_content"
android:layout_marginBottom="20dp"
android:clipChildren="false"
app:layout_constraintBottom_toBottomOf="@+id/iv_back"
app:layout_constraintEnd_toEndOf="parent"
app:layout_constraintStart_toStartOf="parent">
<ImageView
android:id="@+id/iv_middle"
android:layout_width="wrap_content"
android:layout_height="wrap_content"
android:src="@mipmap/banner_a_middle" />
<com.ziwenl.library.GravityRotationImageView
android:id="@+id/iv_front"
android:layout_width="wrap_content"
android:layout_height="wrap_content"
android:src="@mipmap/banner_a_front" />
</FrameLayout>
</androidx.constraintlayout.widget.ConstraintLayout>( ps : 可按需给父 View 设置 android:clipChildren="false" 属性,控制前景移动到边界时是否裁剪 )
3.使用帮助类 GravityRotationHelper 绑定前景和后景 View 实现目标效果
override fun onCreate(savedInstanceState: Bundle?) {
super.onCreate(savedInstanceState)
val viewBinding = ActivitySinglepageBinding.inflate(layoutInflater)
setContentView(viewBinding.root)
GravityRotationHelper(this).attachViews(viewBinding.ivFront, viewBinding.ivBack)
}( ps:关于在 banner 中实现该效果,可参考 demo 中的 BannerActivity 类 )
3.补充说明
- 提取成帮助类而不是在自定义 View 中进行传感器的创建与注册监听,主要是为了减少耦合及资源开销
- 自定义 ImageView 是为了使用 Scroller 来进行辅助滚动,如果只是在 View 外部通过监听设备倾斜角再通过 View 的 scroll 方法进行移动,会出现抖动及跳动问题
- 除了使用 磁场传感器 与 加速度传感器 来感知设备倾斜角度变化,还能使用 陀螺仪传感器 来感知设备的倾斜角度变化,同样能实现目标效果
private val NS2S = 1.0f / 1000000000.0f
private var timestamp = 0f
private fun init(context: Context){
val sensorManager = context.getSystemService(Context.SENSOR_SERVICE) as? SensorManager
val gyroscopeSensor = sensorManager?.getDefaultSensor(Sensor.TYPE_GYROSCOPE)
sensorManager?.registerListener(object : SensorEventListener {
override fun onSensorChanged(event: SensorEvent) {
if (event.sensor.type == Sensor.TYPE_GYROSCOPE) {
if (timestamp != 0f) {
val dT = (event.timestamp - timestamp) * NS2S
angle[0] += event.values[0] * dT
angle[1] += event.values[1] * dT
val angleY = Math.toDegrees(angle[0].toDouble()).toFloat()
val angleX = Math.toDegrees(angle[1].toDouble()).toFloat()
//TODO
}
timestamp = event.timestamp.toFloat()
}
}
override fun onAccuracyChanged(sensor: Sensor?, accuracy: Int) {
}
}, gyroscopeSensor, SENSOR_DELAY_GAME)
}4.最后
关于该伪裸眼 3D 效果,自自如团队发布技术文章之后,网上也有一系列 Demo 及技术文章,本人在实现过程中遇到了抖动和跳动问题(主要由于传感器数值变化过于敏感及频繁导致),曾去下载一些 Demo 进行参考,发现同样是存在该问题。其中有篇文章是通过 陀螺仪传感器 来实现该效果的,也做了抖动过滤,但在小米 6 上运行时发现会出现卡顿效果,所以最后还是自己调整优化避免了该现象的出现。
最后感谢 自如大前端团队 的实现方案分享,通过新颖取巧的方式,加强了用户的 UI 体验。而自如的技术文章更着重于分享思路,所以在此基础上进行实现与优化,也是一种不可多得的乐趣。
- 源码及 Demo 地址:GitHub - ziwenL/GravityRotationTo3D
- 如有更好的见解或建议,欢迎留言