Ubuntu20.04安装+ORB_SLAM3环境配置运行【包含所有安装包】
一 、Ubuntu 安装:
参考博客:ubuntu安装
参考博客:orb-slam3顺风版
1. ubuntu20.04镜像地址:https://pan.baidu.com/s/1hEx-rASvDbgLRwOJsYZVUQ?pwd=9791 提取码: 9791
2. 启动盘烧制工具下载: https://pan.baidu.com/s/1Du7MHGchRqWc-J6R-ElpvQ?pwd=1234 提取码: 1234
二、ORB-SLAM3安装:
2.1环境库安装
2.1.1安装git、g++
sudo apt-get install git
sudo apt install g++
2.1.2安装cmake
cmake安装包: https://pan.baidu.com/s/1zO8AadBNc-IKTX3gpYaJ9A?pwd=1234 提取码: 1234
1.将压缩包解压到主目录,并将该解压后的文件移动到/opt目录下,执行以下命令:
mv cmake-3.23.2-linux-x86_64 /opt/cmake-3.23.2
移动成功后/opt/cmake-3.23.2目录下应该有以下文件:
2.建立连接:
ln -sf /opt/cmake-3.23.2/bin/* /usr/bin
3.查看cmake版本
cmake --version
执行后显示:
--------------------------------------------------------------------------cmake安装结束------------------------------------------------------------------------------------------
2.1.3安装eigen3
eigen3安装包:https://pan.baidu.com/s/1fk_OLOF4Iq3PQYpAHMcO7w?pwd=1234 提取码: 1234
1.将安装包解压到主目录下,进入该目录下并执行:
cd eigen-3.3.7
mkdir build
cd build
cmake ..
sudo make install
最后查看eigen3版本:
pkg-config --modversion eigen3
eigen版本显示为3.3.7:
-------------------------------------------------------------------------eigen3安装结束------------------------------------------------------------------------------------------
2.1.4安装opencv
提示:opencv最好安装稳定版本,我的是3.4.10
安装包:https://pan.baidu.com/s/11x98TrpPNcKsvvcc9s9BLA?pwd=1234 提取码: 1234
将opencv安装包解压到主目录下:
进入主目录下输入以下命令:
cd opencv
mkdir build
cd build
cmake -D CMAKE_BUILD_TYPE=Release -D OPENCV_GENERATE_PKGCONFIG=YES ..
make -j16
sudo make install
查看版本:
pkg-config --modversion opencv
--------------------------------------------------------------------------oencv安装结束-------------------------------------------------------------------------------------------
2.1.5安装PANGOLIN
提示:建议装0.6版本的,高版本可能导致无法运行
安装包:链接: https://pan.baidu.com/s/1x4CTGeuf0jrUsrAcceADTQ?pwd=4567 提取码: 4567
将安装包解压到主目录下
执行以下命令:
cd Pangolin
mkdir build && cd build
cmake ..
make -j16
sudo make install
在pangolin文件夹下执行以下命令,检测安装成功与否:
cd examples/HelloPangolin
./HelloPangolin
安装成功后,显示如下图:
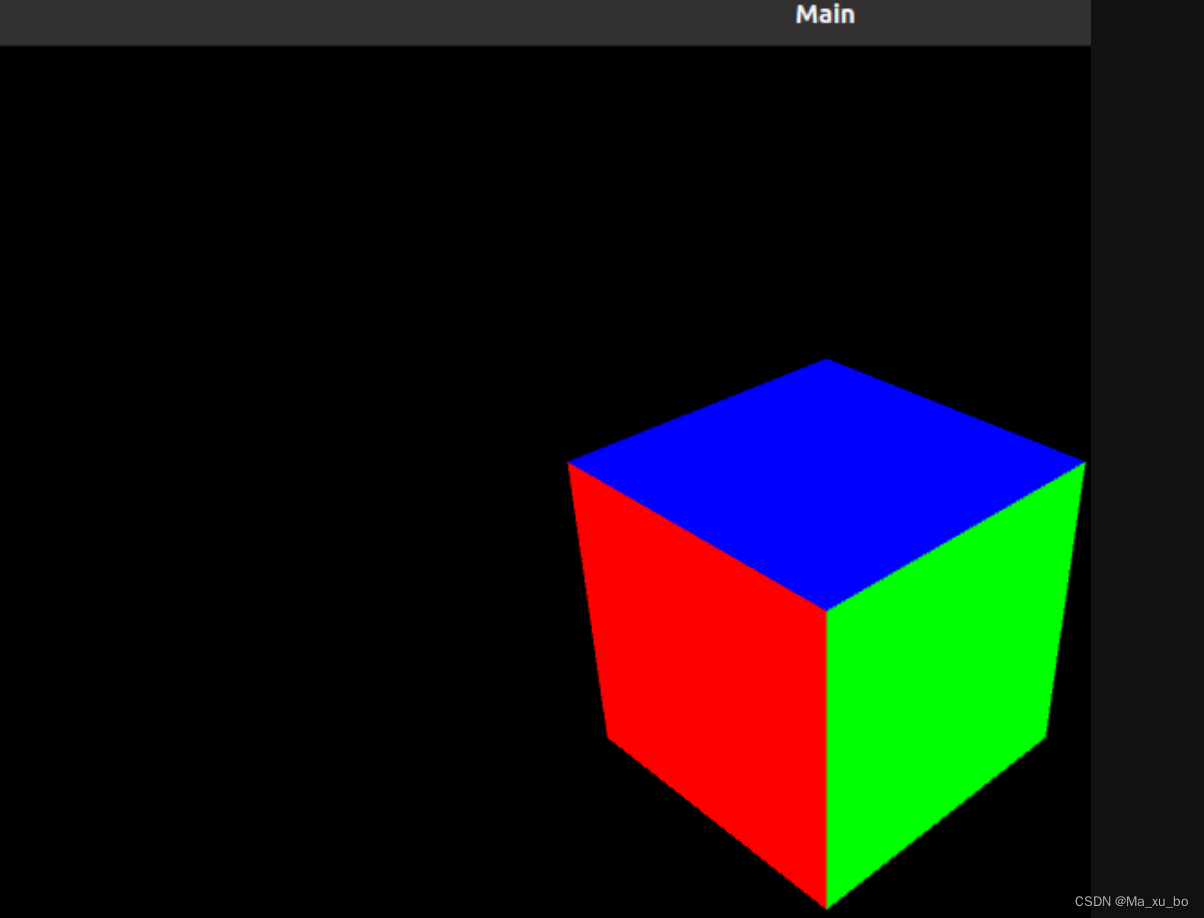
------------------------------------------------------------------------pangolin安装结束-----------------------------------------------------------------------------------------
2.1.6安装boost
安装包:https://pan.baidu.com/s/1v9dFIlDKjJ0ByntYCtNL6g?pwd=4567 提取码: 4567
方法一(我自己用的):
将压缩包解压到主目录下:

进入目录后,执行下面命令:
sudo ./bootstrap.sh
sudo ./b2 install
方法二:
执行下面命令(安装包有点大):
sudo apt-get install libboost-all-dev
------------------------------------------------------------------------boost安装结束-----------------------------------------------------------------------------------------
2.2ORB_SLAM3部署运行
方法一:可直接运行版
代码下载:https://pan.baidu.com/s/1Ze_LhowcIDa5mIubfHEL-A?pwd=4567 提取码: 4567
将代码解压到某个位置:
进入目录,执行以下命令:
cd ORB_SLAM3-master
sudo chmod +x build.sh
sudo ./build.sh
运行成功后显示:
再执行:
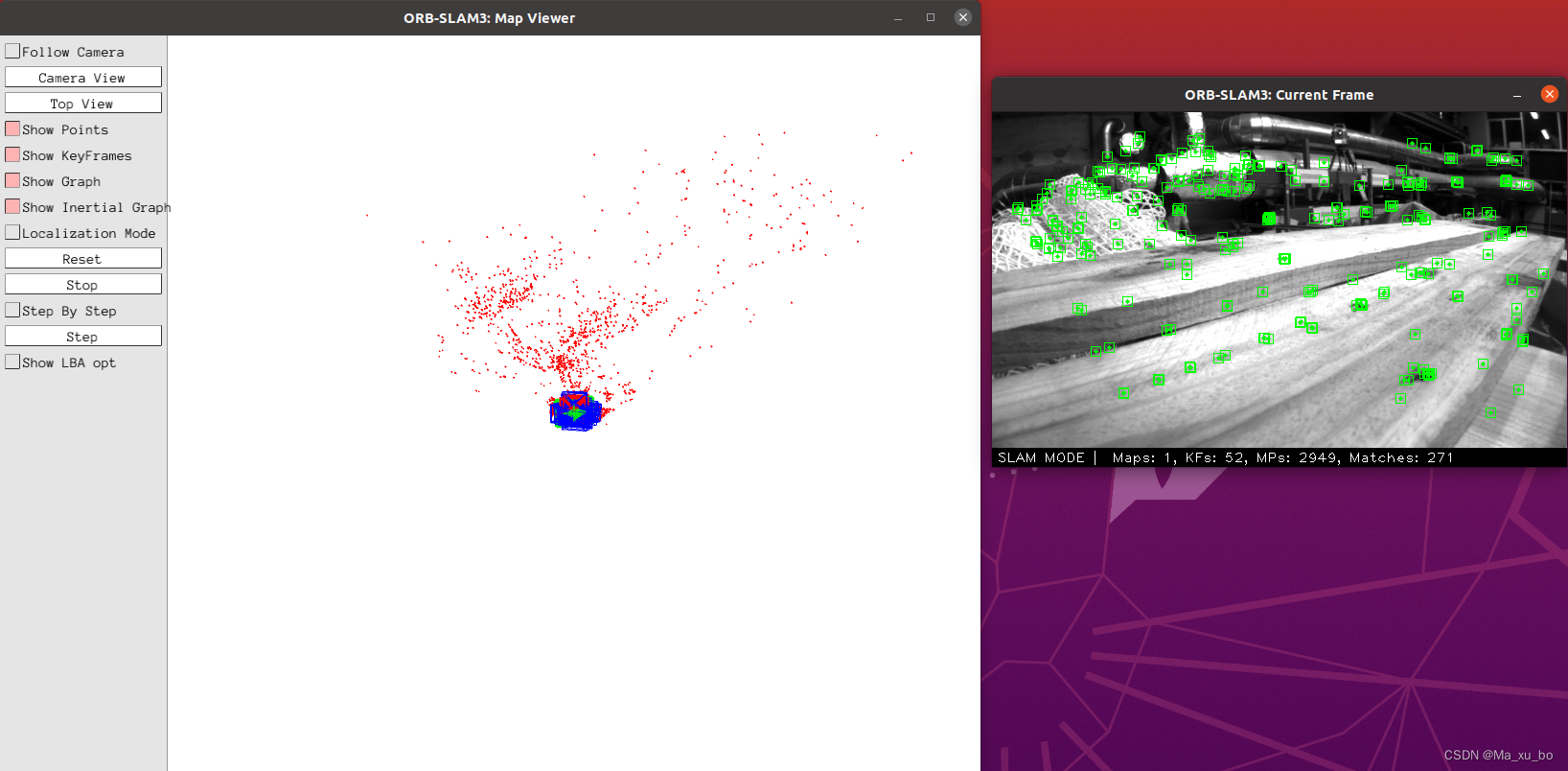
./Examples/Monocular/mono_euroc ./Vocabulary/ORBvoc.txt ./Examples/Monocular/EuRoC.yaml ./dataset/MH01 ./Examples/Monocular/EuRoC_TimeStamps/MH01.txt
运行成功显示:
至此安装结束。
方法二:官网代码下载
也可自行去官网下载ORB_SLAM3代码只是需要附上数据:
官方代码:https://github.com/UZ-SLAMLab/ORB_SLAM3
数据:https://pan.baidu.com/s/1O8XjIgCkzhIJolijknBF8w?pwd=7894 提取码: 7894
将数据包dataset直接放在ORB_SLAM3包下即可编译运行(代码同上):
cd ORB_SLAM3-master
sudo chmod +x build.sh
sudo ./build.sh
./Examples/Monocular/mono_euroc ./Vocabulary/ORBvoc.txt ./Examples/Monocular/EuRoC.yaml ./dataset/MH01 ./Examples/Monocular/EuRoC_TimeStamps/MH01.txt
注意:
在CMakeLists.txt文件下将opencv版本和eigen版本修改为自己本机的版本,(或者只写到类似于3.4这样的形式):
有可能不修改也能运行,可参考其他博客
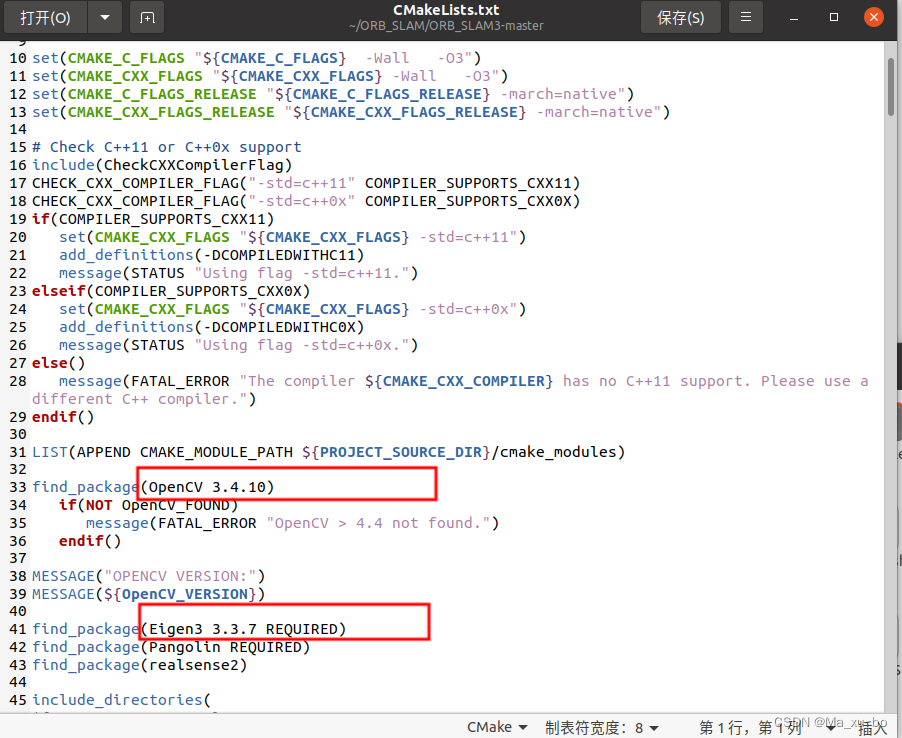
在Thirdparty包下的g2o和DBoW2下的CMakeLists.txt同上,一般不做修改,但若是别人修改后的代码则需要修改。
在安装运行过程中可能遇到其他问题,可自行搜索解决