Webot增加节点到机器人手臂
1.打开Webot,导入机器人
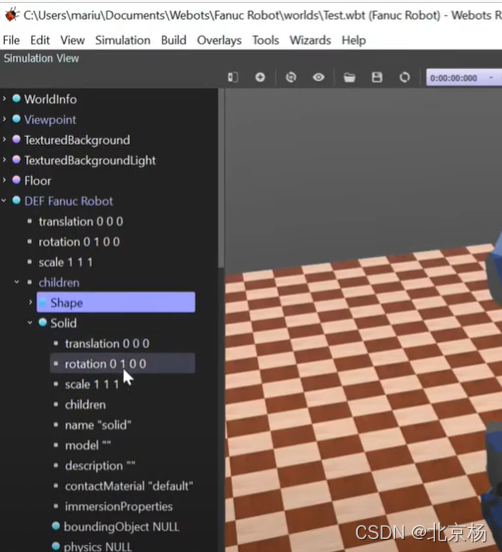
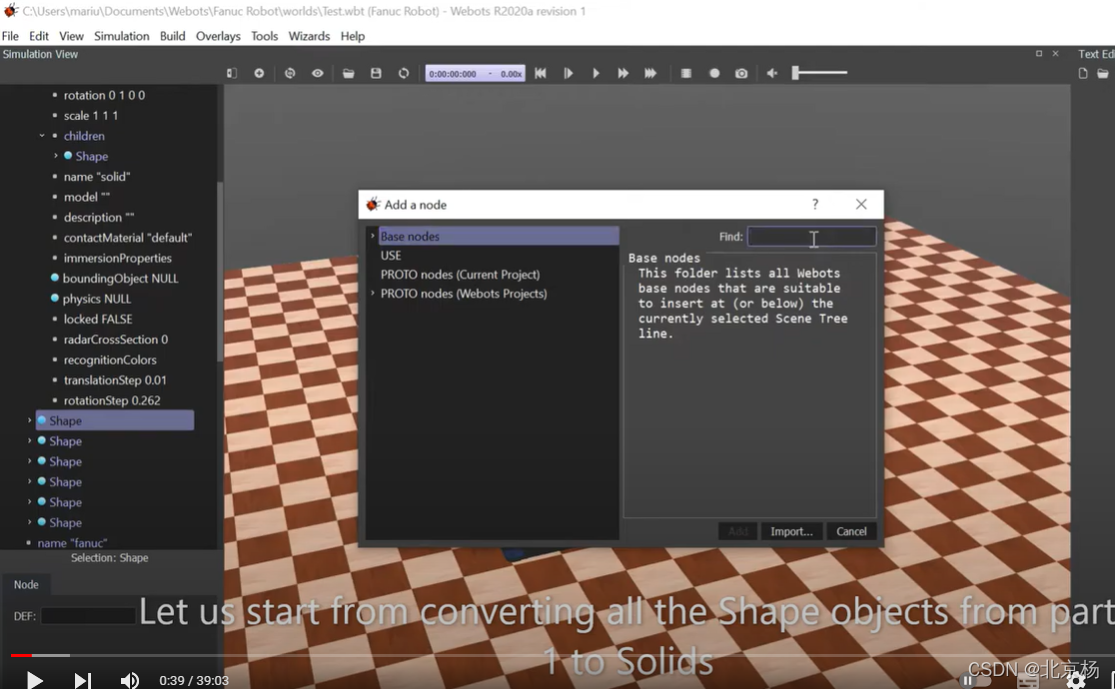
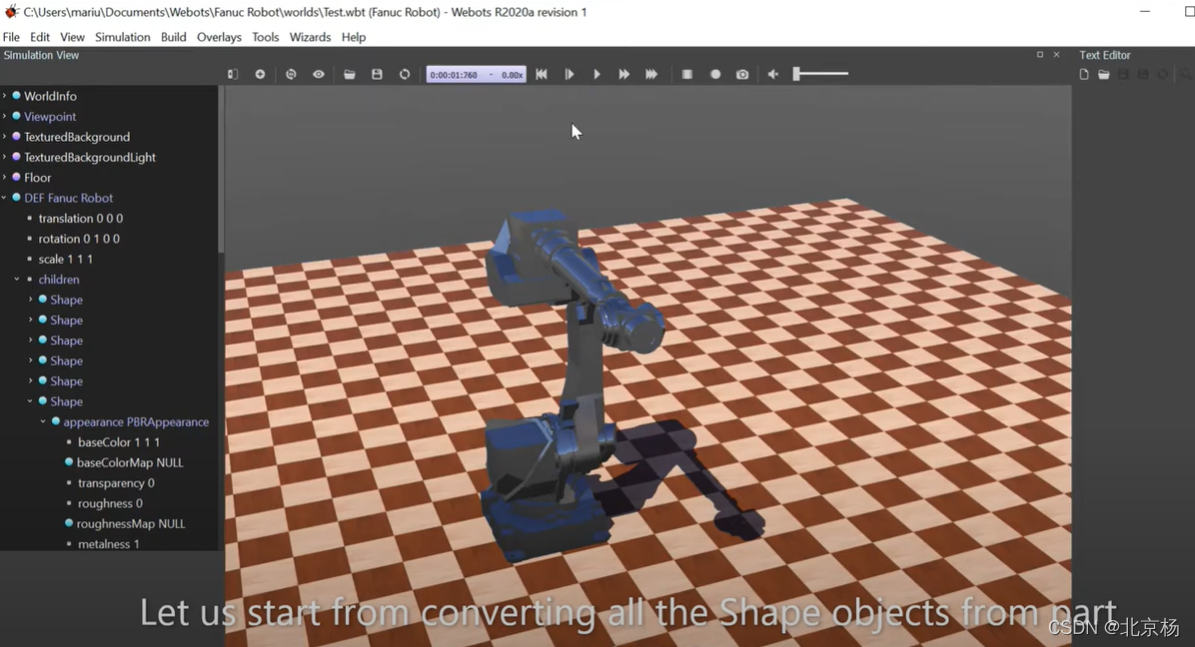 2.在一个关节上增加一个Solid点
2.在一个关节上增加一个Solid点
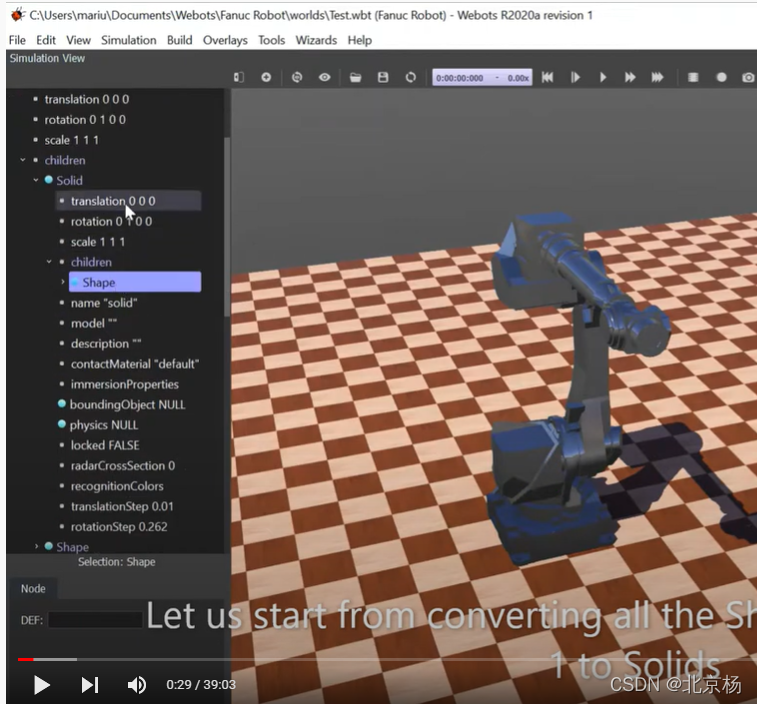
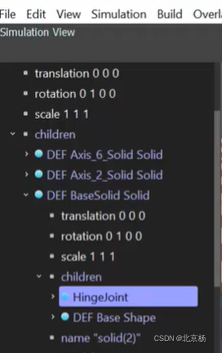
3.把shape关节点放到Solid点下,作为child
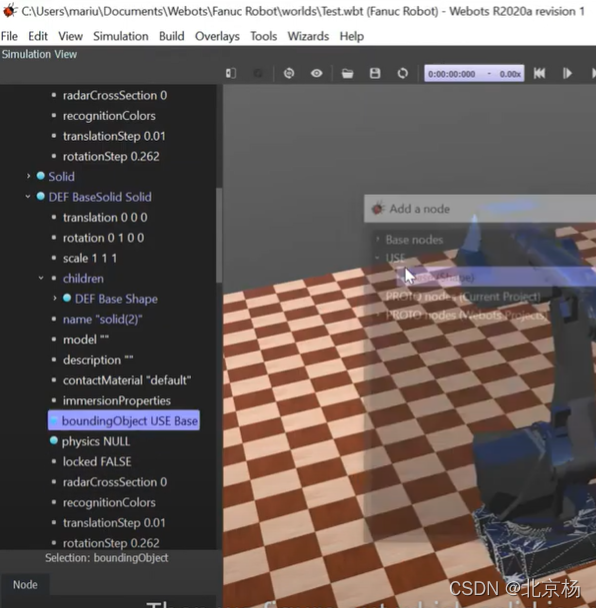
4.修改最下面的关节点名字为BaseSolid,并修改boundingObject为USE Base
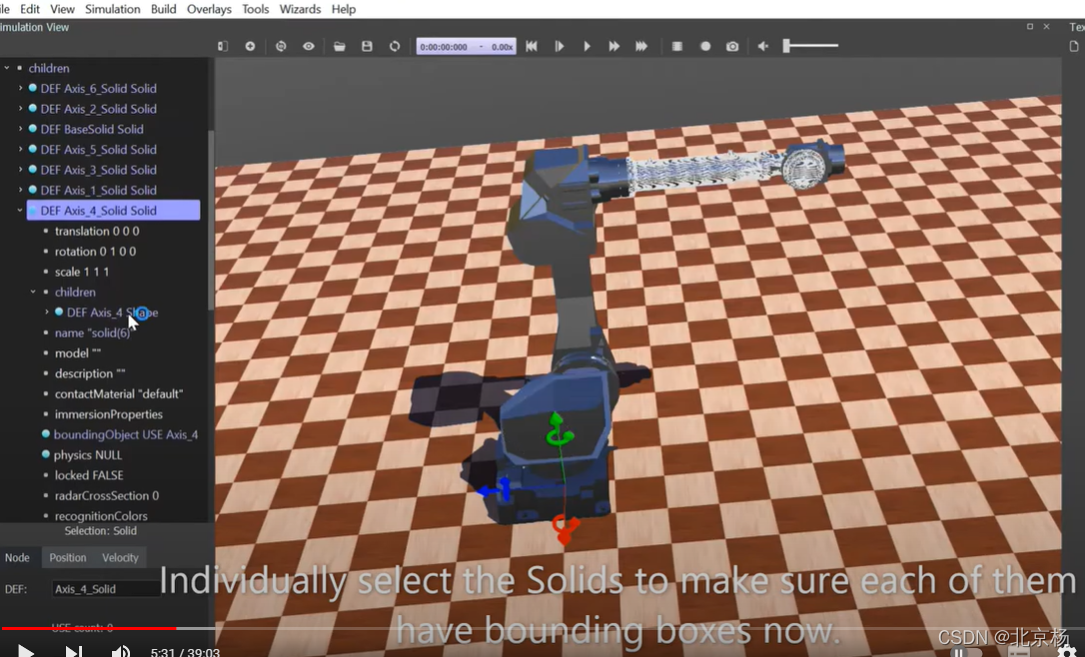
5.逐步修改其它的名字为Axis_{n}和Axis_{n}_Solid
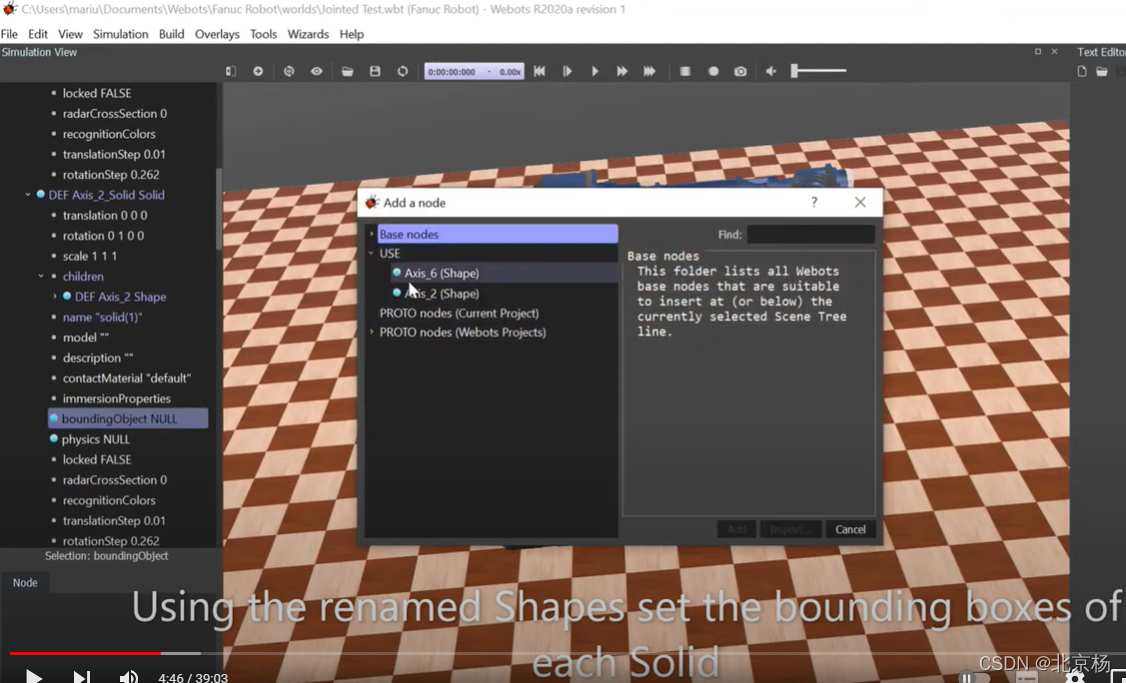
6.用改过名的名字Solid设置Boundingbox为对应的Shape
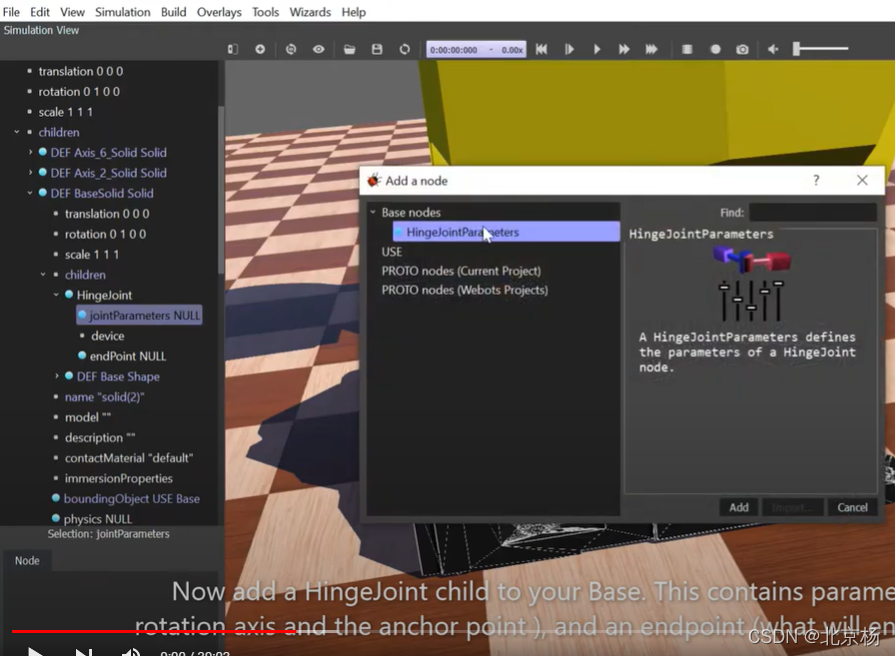
7.给底座增加HingeJoint节点
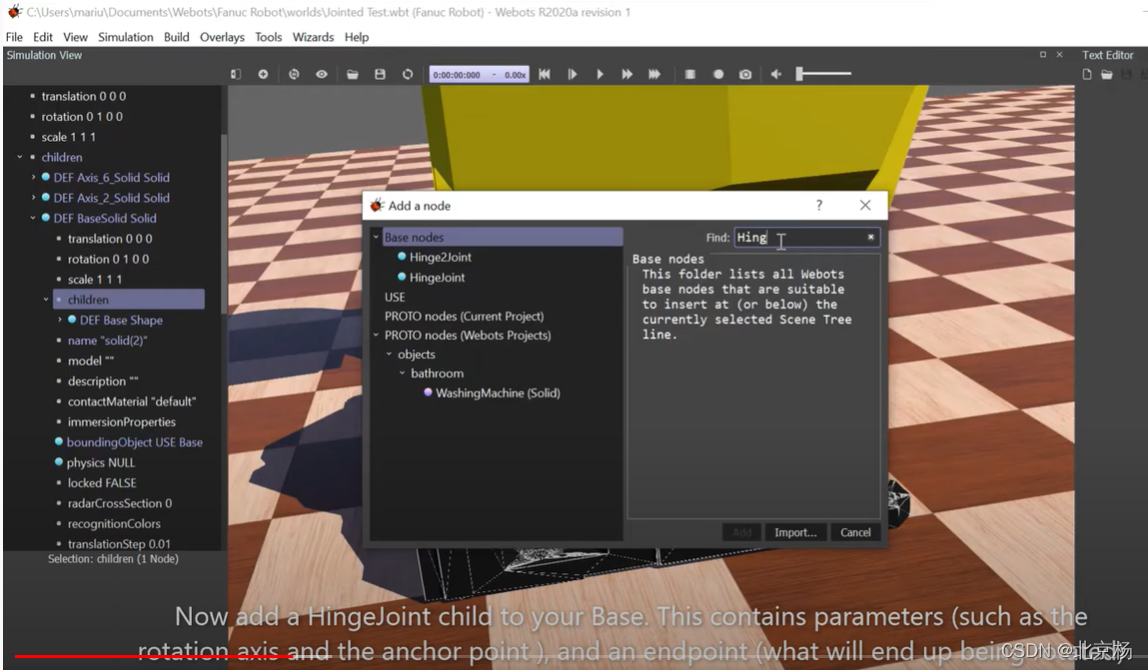
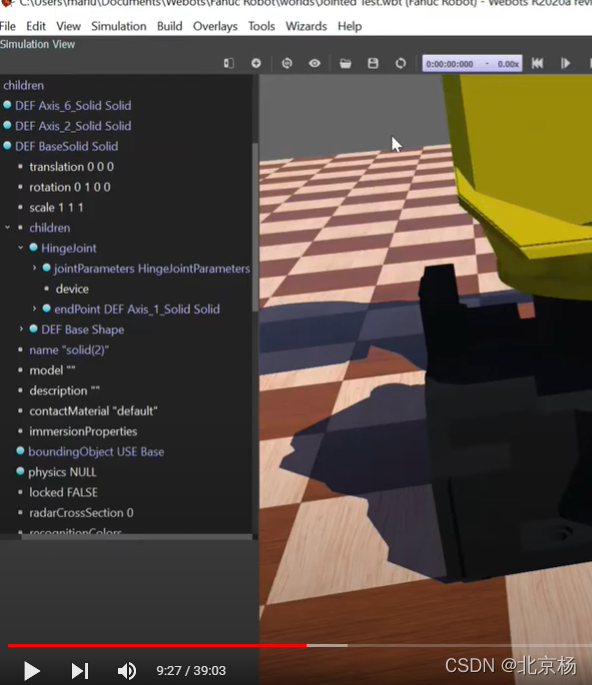
8.设置链接节点参数
9.设置端点节点
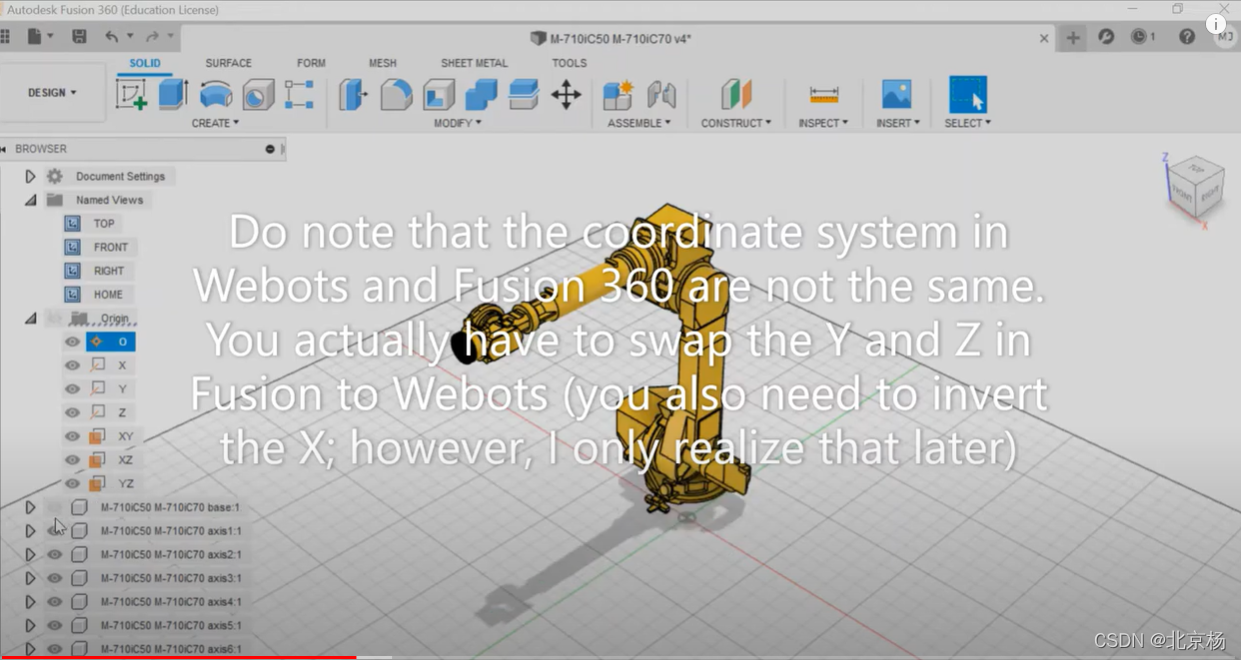
10.由于Webot的坐标轴和AutoCAD的坐标轴不同,需要转换Y轴和Z轴
原文:https://www.youtube.com/watch?v=s151UClAnEk https://www.youtube.com/watch?v=s151UClAnEk
https://www.youtube.com/watch?v=s151UClAnEk