路径规划(一):使用Matlab快速绘制栅格地图
目录
一、Matlab快速绘制栅格地图
声明:本文是学习古月居~基于栅格地图的机器人路径规划算法指南 • 黎万洪 后写的笔记,好记性不如烂笔头!方便自己日后的巩固与复习,这个教程讲的很高,值得推荐!
1、几种常用的地图形式:
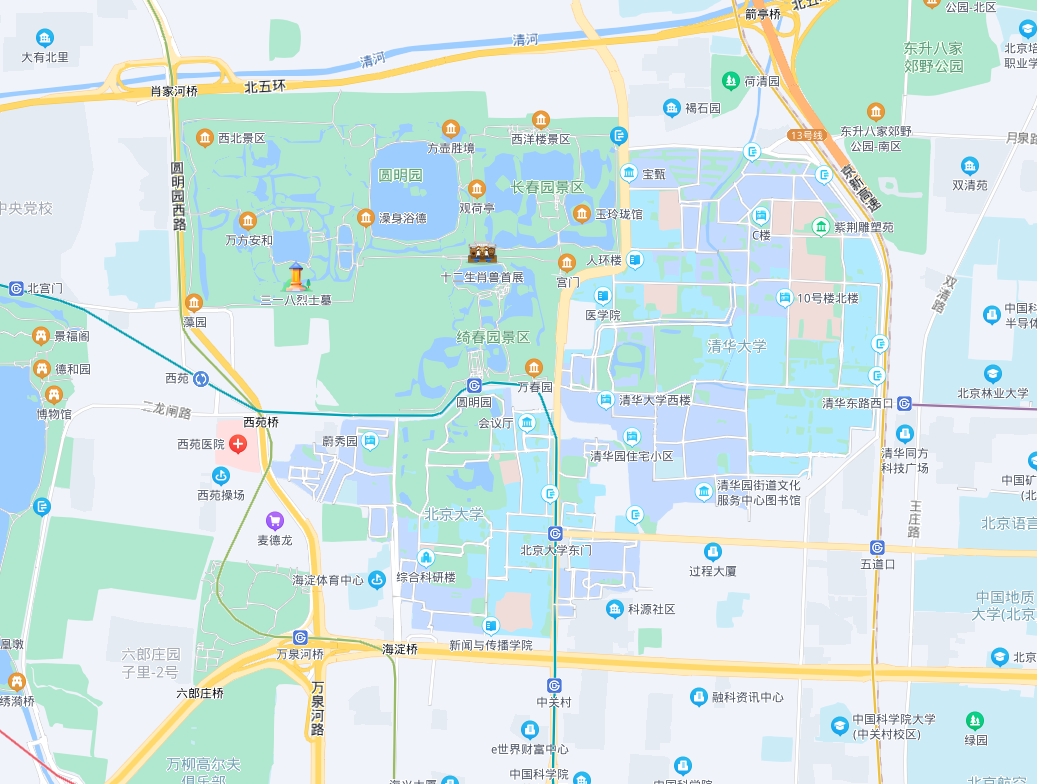
1.1、尺度地图:
具有真实的物理尺度,如:栅格地图、特征地图、点云地图,常用于地图构建、定位、SLAM、小规模路径规划。
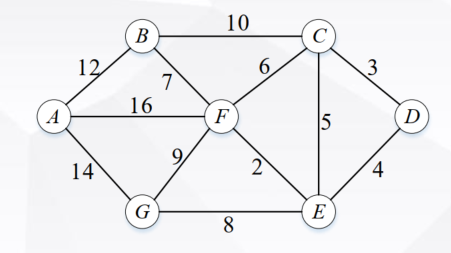
1.2、拓扑地图:
不具备真实的物理尺度,只表示不同地点的连接关系和距离,如铁路网。
1.3、语义地图:
加标签的尺度地图,常用于人机交互。
2、栅格地图用于路径规划的优势:
①、可以将任意形状轮廓的地图,用足够精细的栅格进行绘制;
②、每一个栅格,可以通过不同颜色表示不同含义,如黑色代表障碍物、黄色代表起点、红色代表终点;
③、基于栅格地图进行路径规划有横、纵、斜三个规划方向。对应室内低速机器人可以完全按照路径行走;对于中高速机器人,可以考虑将路径进行平滑处理,以适用于非完全约束系统。
3、matlab绘制栅格地图的核心函数及思想:
3.1、colormap函数:
为栅格地图创建自定义颜色。如黄色栅格代表起点、红色为终点。
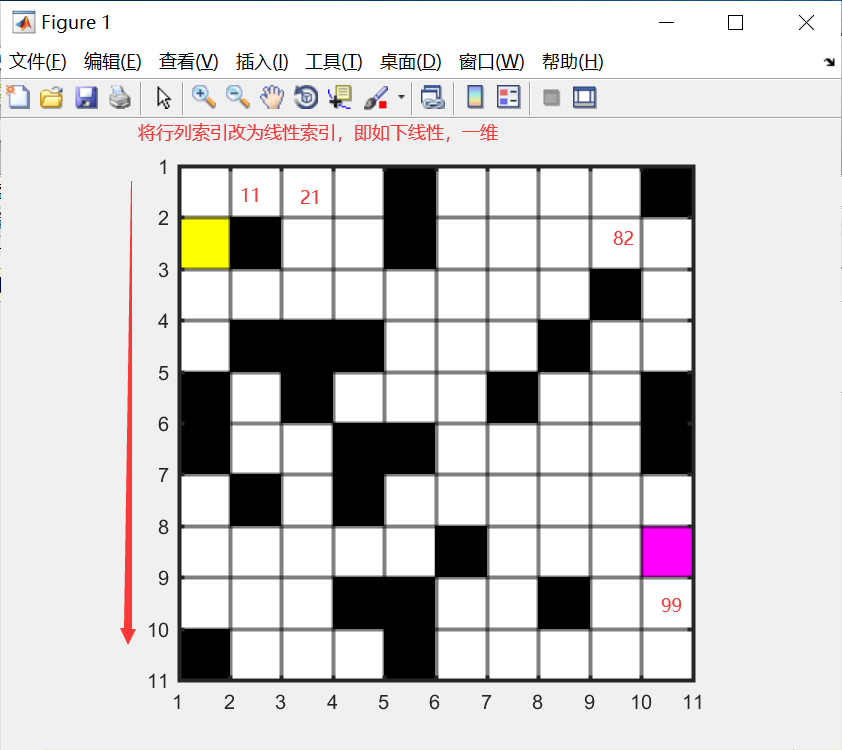
3.2、sub2ind函数:
将行列索引转为线性索引。对于右图栅格地图,10行1列,行从左上角自上而下排序,列从左上角自左向右排序。
3.3、ind2sub函数:
与sub2ind相反,是将线性索引转为行列索引。
3.4、为了在栅格地图呈现随机障碍物的效果,可以设置障碍物出现频率数值,根据该数据在所有栅格中生成随机数,从而确定障碍物栅格。
3.5、image函数:
利用colormap建立的颜色图,将数组信息显示为图像。
4、具体例子:
4.1、利用Matlab快速绘制栅格地图matlab代码:
clc
clear
close all
%% 构建颜色MAP图
cmap = [1 1 1; ... % 1-白色-空地
0 0 0; ... % 2-黑色-静态障碍
1 0 0; ... % 3-红色-动态障碍
1 1 0;... % 4-黄色-起始点
1 0 1;... % 5-品红-目标点
0 1 0; ... % 6-绿色-到目标点的规划路径
0 1 1]; % 7-青色-动态规划的路径
% 构建颜色MAP图
colormap(cmap);
%% 构建栅格地图场景
% 栅格界面大小:行数和列数
rows = 10;
cols = 10;
% 定义栅格地图全域,并初始化空白区域
field = ones(rows, cols);
% 障碍物区域
obsRate = 0.3;
obsNum = floor(rows*cols*obsRate);
obsIndex = randi([1,rows*cols],obsNum,1);
field(obsIndex) = 2;
% 起始点和目标点
startPos = 2;
goalPos = rows*cols-2;
field(startPos) = 4;
field(goalPos) = 5;
%% 画栅格图
image(1.5,1.5,field);
grid on;
set(gca,'gridline','-','gridcolor','k','linewidth',2,'GridAlpha',0.5);
set(gca,'xtick',1:cols+1,'ytick',1:rows+1);
axis image;
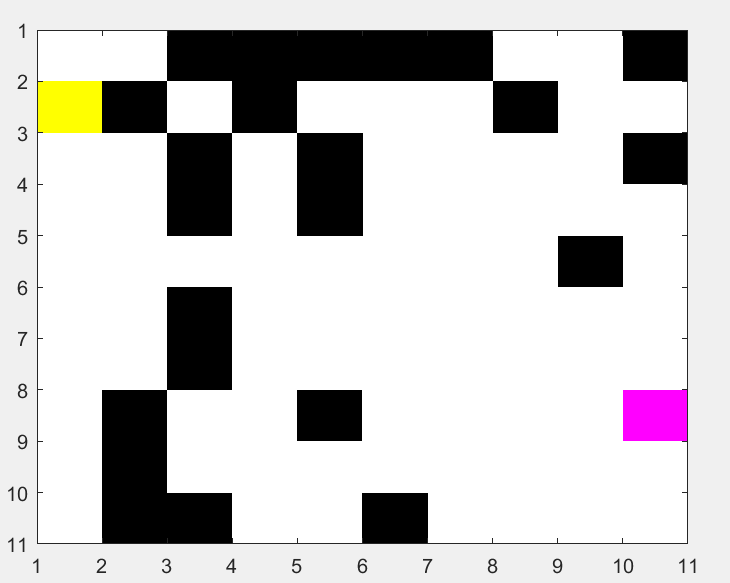
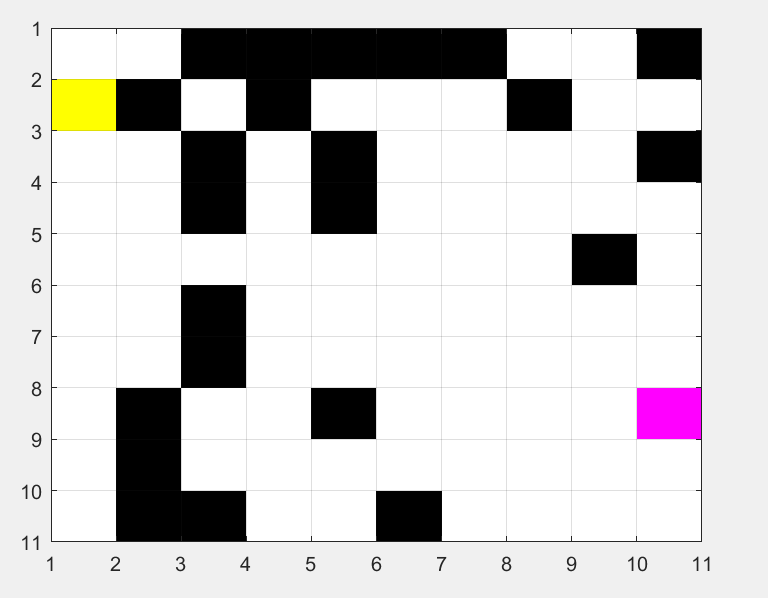
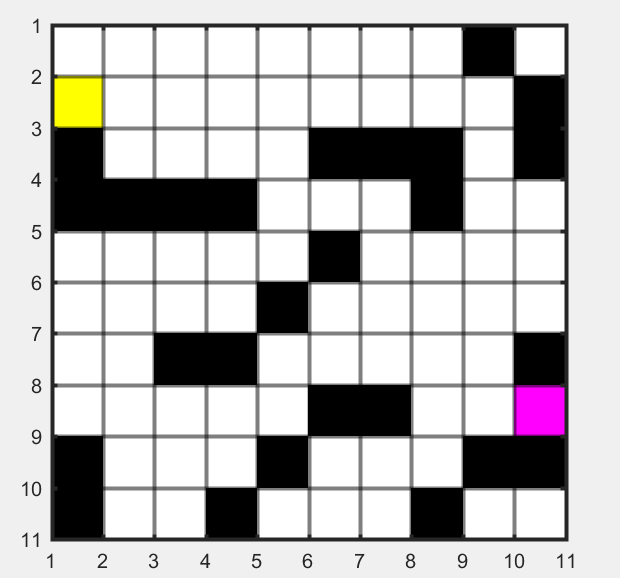
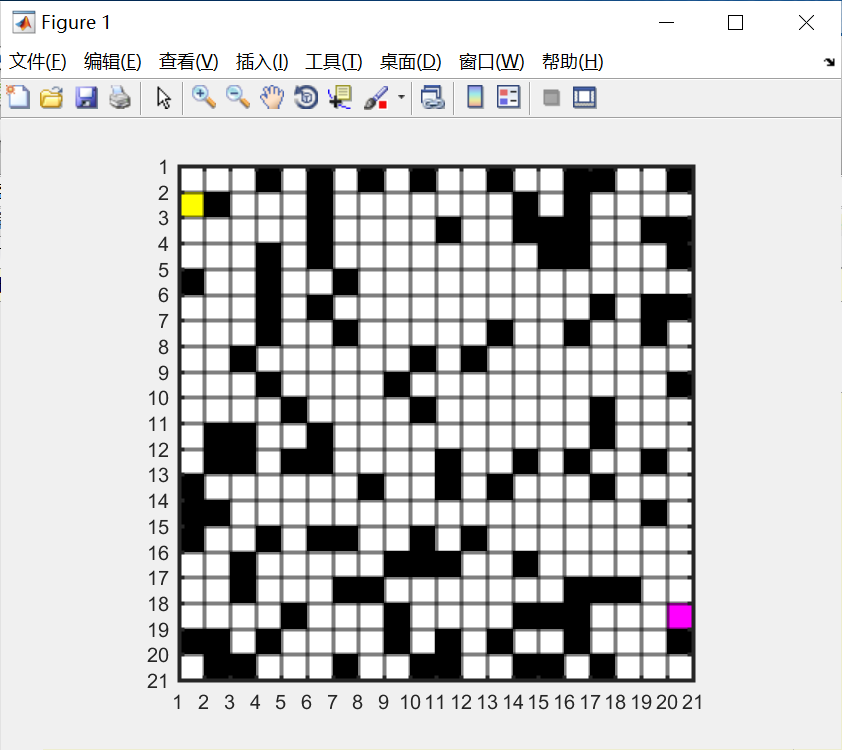
4.2、运行结构:
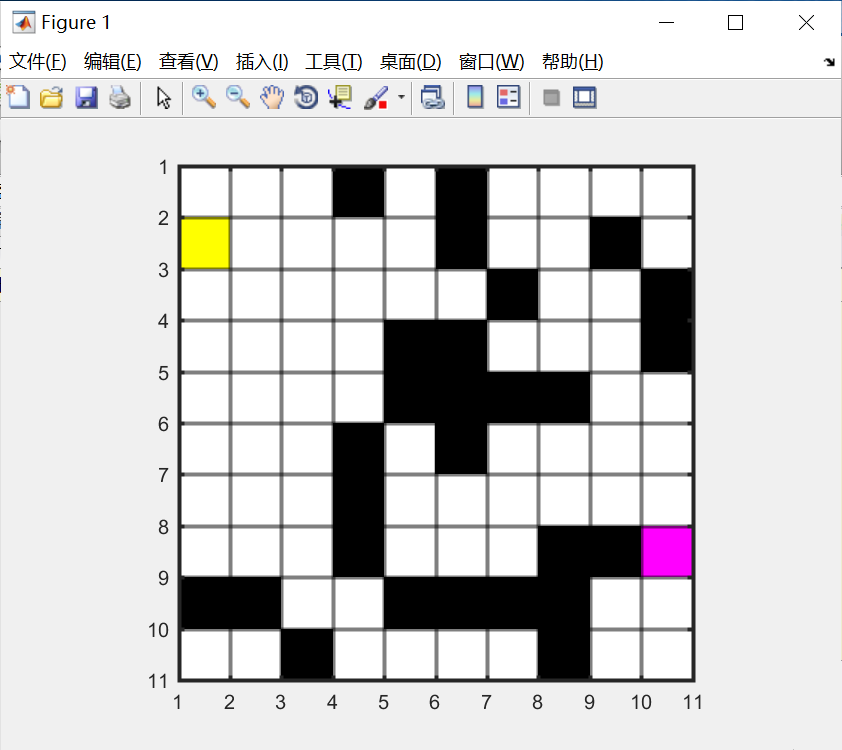
4.3、具体分析
1、
clc
clear
close all
clc:清除命令窗口的内容,对工作环境中的全部变量无任何影响
close:关闭当前的Figure窗口
close all:关闭所有的Figure窗口
clear:清除工作空间的所有变量
clear all:清除工作空间的所有变量,函数,和MEX文件
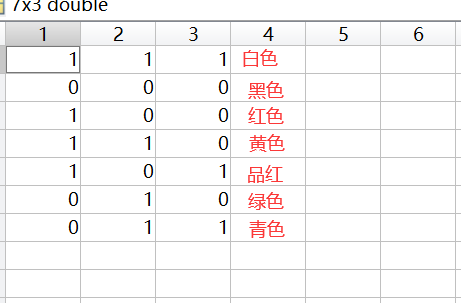
2、自定义构建颜色MAP图
%% 构建颜色MAP图
cmap = [1 1 1; ... % 1-白色-空地
0 0 0; ... % 2-黑色-静态障碍
1 0 0; ... % 3-红色-动态障碍
1 1 0;... % 4-黄色-起始点
1 0 1;... % 5-品红-目标点
0 1 0; ... % 6-绿色-到目标点的规划路径
0 1 1]; % 7-青色-动态规划的路径
运行后会建立对应变量的MAP图值
3、colormap构建颜色MAP图
% 构建颜色MAP图
colormap(cmap);
4、构建栅格地图场景:大小
%% 构建栅格地图场景
% 栅格界面大小:行数和列数
rows = 10;
cols = 10;
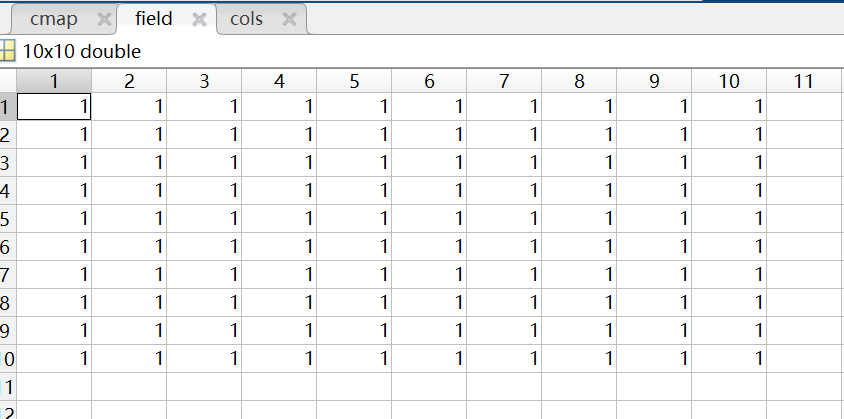
5、定义栅格地图全域,并初始化空白区域
% 定义栅格地图全域,并初始化空白区域
field = ones(rows, cols);
将栅格图全设置为白色
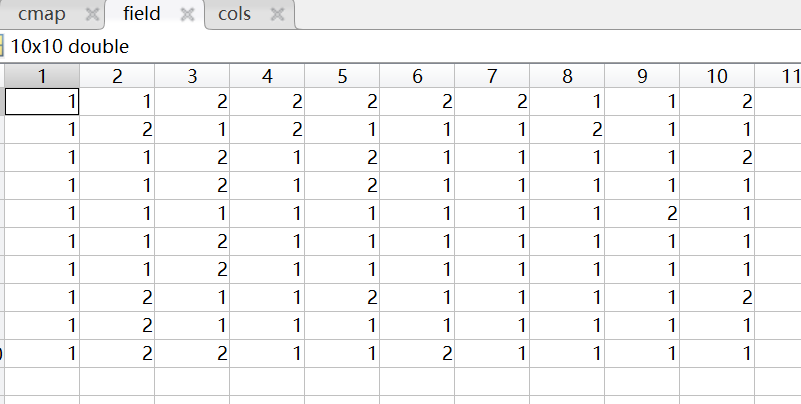
6、障碍物区域
% 障碍物区域
obsRate = 0.3;
obsNum = floor(rows*cols*obsRate);
obsIndex = randi([1,rows*cols],obsNum,1);
field(obsIndex) = 2;
obsRate = 0.3;%障碍物占比率
obsNum = floor(rowscolsobsRate);%计算障碍物个数;
obsIndex = randi([1,rows*cols],obsNum,1);%随机设置障碍物
得到障碍物的区域
7、起始点和目标点
起始点和目标点要定义在障碍物后面,不然可能会和障碍物冲突
% 起始点和目标点
startPos = 2;
goalPos = rows*cols-2;
field(startPos) = 4;
field(goalPos) = 5;
startPos = 2; &起点
goalPos = rows*cols-2;%终点
field(startPos) = 4; %起点为黄色
field(goalPos) = 5; %终点为红色
8、画栅格图
%% 画栅格图
image(1.5,1.5,field);
grid on;set(gca,'gridline','-','gridcolor','k','linewidth',2,'GridAlpha',0.5);
set(gca,'xtick',1:cols+1,'ytick',1:rows+1);
axis image;
image(1.5,1.5,field);%画出颜色图
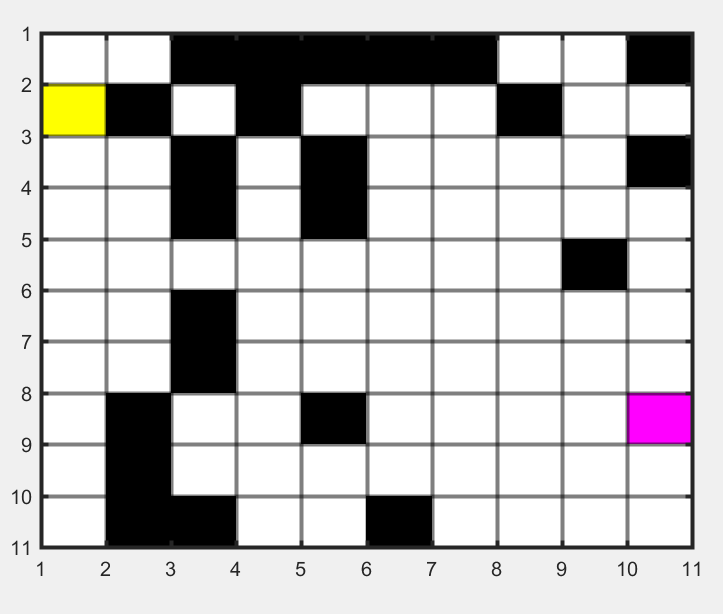
grid on;% 画出网格
set(gca,‘gridline’,’-’,‘gridcolor’,‘k’,‘linewidth’,2,‘GridAlpha’,0.5); % 设置网格为:网格线实线、颜色黑色、线宽2、透明度0.5;
set(gca,‘xtick’,1:cols+1,‘ytick’,1:rows+1); % 设置长宽高为一样~正方形
axis image;