Java并发编程第12讲——cancelAcquire()流程详解及acquire方法总结
上篇文章介绍了AQS的设计思想以及独占式获取和释放同步状态的源码分析,但是还不够,一是感觉有点零零散散,二是里面还有很多细节没介绍到——比如cancelAcquire()方法(重点),迫于篇幅原因,今天就把它放到这篇文章里,继续深入AQS!
一、acquire方法
源码的分析在上一篇文章,感兴趣的同学可以去看一下,我的建议是两篇文章一起看。
1.1 几个状态(重点)
ps:waitStatus>0说明等待状态时CANCELLED,waitStatus<0为其它状态。
//表示线程已取消:由于在同步队列中等待的线程等待超时或中断
//需要从同步队列中取消等待,节点进入该状态将不会变化(即要移除/跳过的节点)
static final int CANCELLED = 1;
//表示后继节点处于park,需要唤醒:后继节点的线程处于park,而当前节点
//的线程如果进行释放或者被取消,将会通知(signal)后继节点。
static final int SIGNAL = -1;
//表示线程正在等待状态:即节点在等待队列中,节点线程在Condition上,
//当其他线程对Condition调用signal方法后,该节点会从条件队列中转移到同步队列中
static final int CONDITION = -2;
//表示下一次共享模式同步状态会无条件地传播下去
static final int PROPAGATE = -3;
//节点的等待状态,即上面的CANCELLED/SIGNAL/CONDITION/PROPAGATE,初始值为0
volatile int waitStatus;1.2 acquire()流程图及分析
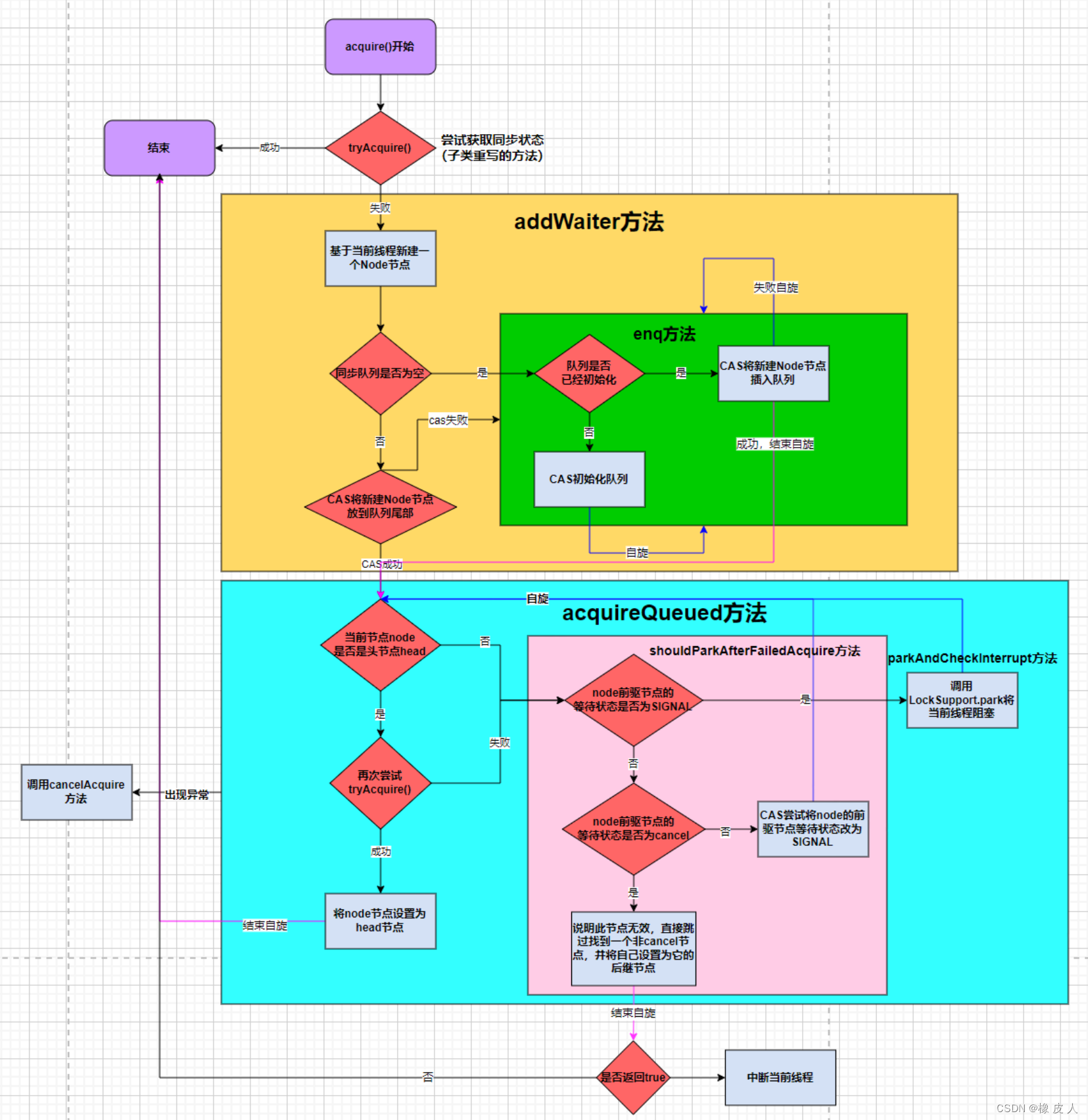
基本流程描述:
- 调用子类重写的tryAcquire方法尝试获取同步状态,若成功则返回,反之进入addWaiter方法。
- 基于当前线程新建一个Node节点,若队列不为空则将Node节点CAS操作挂在队列尾部,队列为空或CAS失败进入enq方法。
- 查看队列是否已经初始化,若没有则优先初始化队列(自旋),随后将Node节点以CAS的方式插入队列,CAS失败则继续自旋,反之进入acquireQueued方法。
- 若Node的前驱节点为头节点,且再次tryAcquire()成功,则将Node设置为头节点,并结束自旋。若两个条件任意一个失败则进入shuoldParkAfterFailedAcquire方法。
- 若Node的前驱节点等待状态为SIGNAL,则调用parkAndCheckInterrupt方法将当前线程阻塞,若当前线程的中断状态为ture则将acquireQueued的返回值置为true,并继续自旋;反之则判断Node的前驱节点的等待状态是否为CANCELLED,若不是则CAS尝试将Node的前驱节点等待状态改为SIGNAL,并继续自旋;若是则说明这个前驱节点无效,直接跳过该节点并找一个非CANCELLED节点作为Node的前驱节点,并结束自旋(acquireQueued方法结束)。
- 若acquireQueued方法返回ture则说明当前线程需要被中断(也就是Node节点的前面还有节点在排队,还没轮到Node节点)。
- 若在acquireQueued方法中出现异常,则会调用cancelAcquire方法进行该节点的取消逻辑,这也是我们今天的重点,下面会具体分析。
二、cancelAcquire方法
上篇文章在分析它的源码时就感觉有点懵懵的,很多地方都不太理解(那面试的时候怎么跟面试官battle啊😁),那么今天就深入的分析一下。
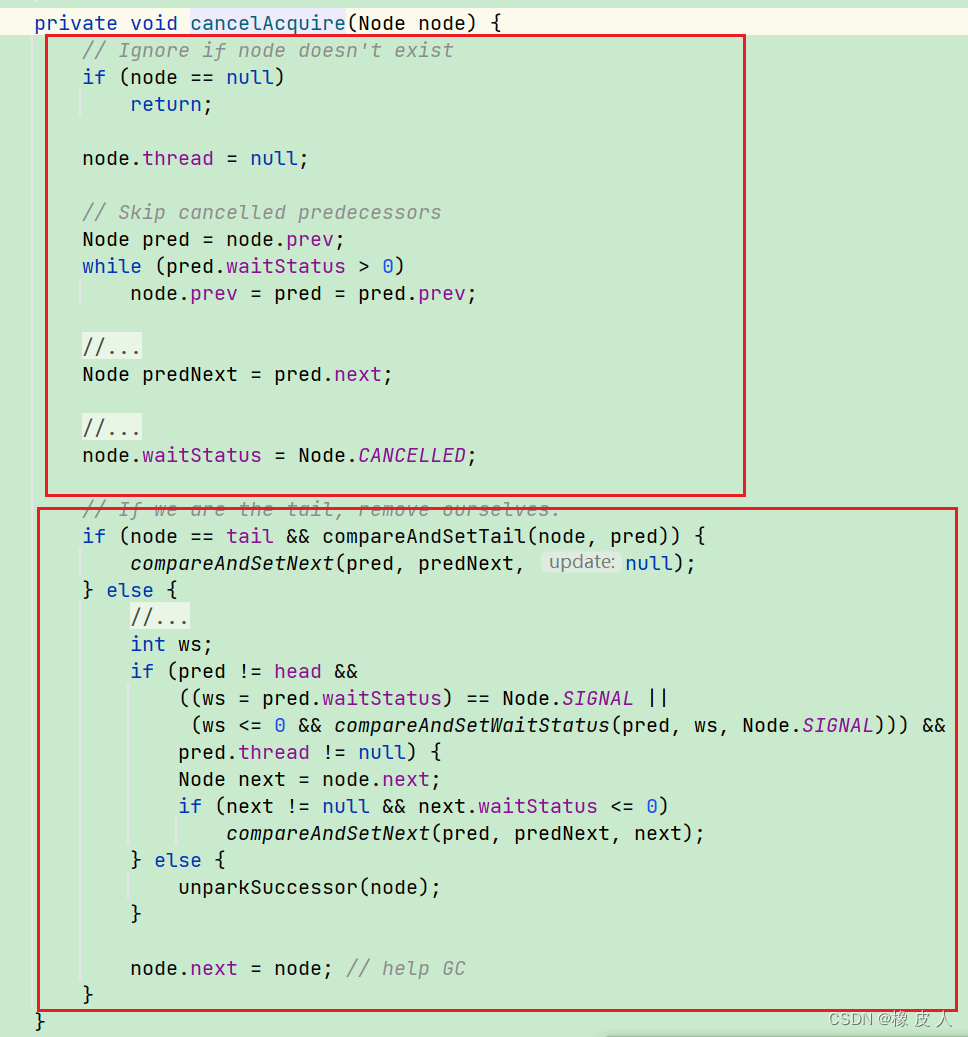
2.1 源码
再次附上源码,方便观看。
在acquireQueued方法中出现异常会走cancelAcquire方法取消正在进行acquire的尝试,以防止死锁或长时间的等待。这里我把它分为两个红框,下面图解流程时会用到。
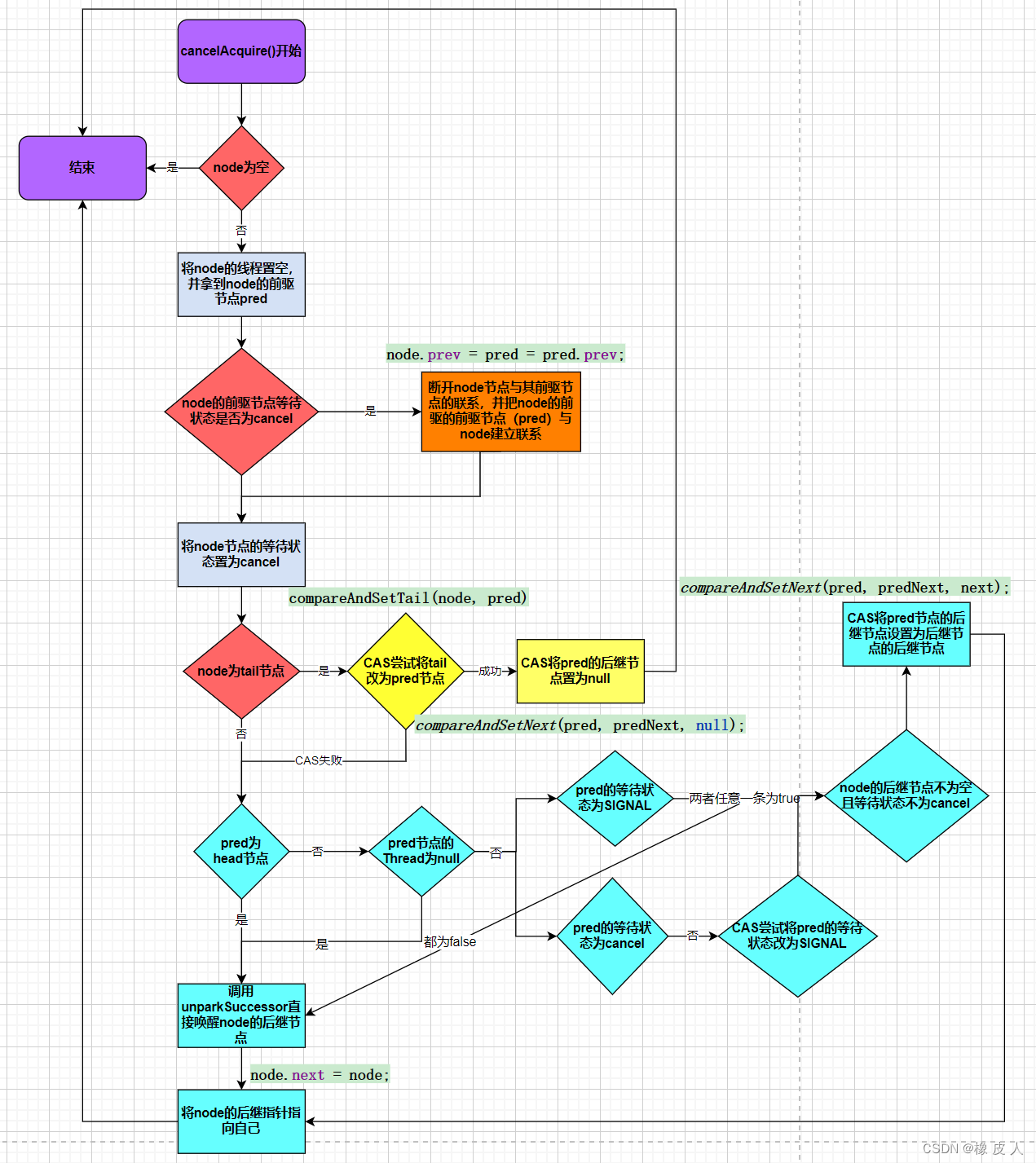
2.2 流程图
解释一下颜色代表的意思:
- 紫色——方法开始和结束。
- 橙色——断开与取消结点联系的执行逻辑。
- 黄色——node结点为tail结点执行的逻辑。
- 蓝色——node结点不为tail结点执行的逻辑(为head结点的后继结点或中间结点)。
- 其它——一般逻辑。
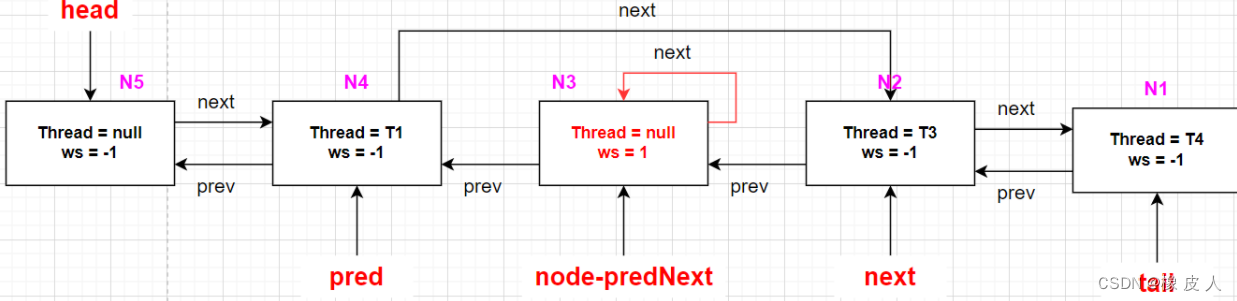
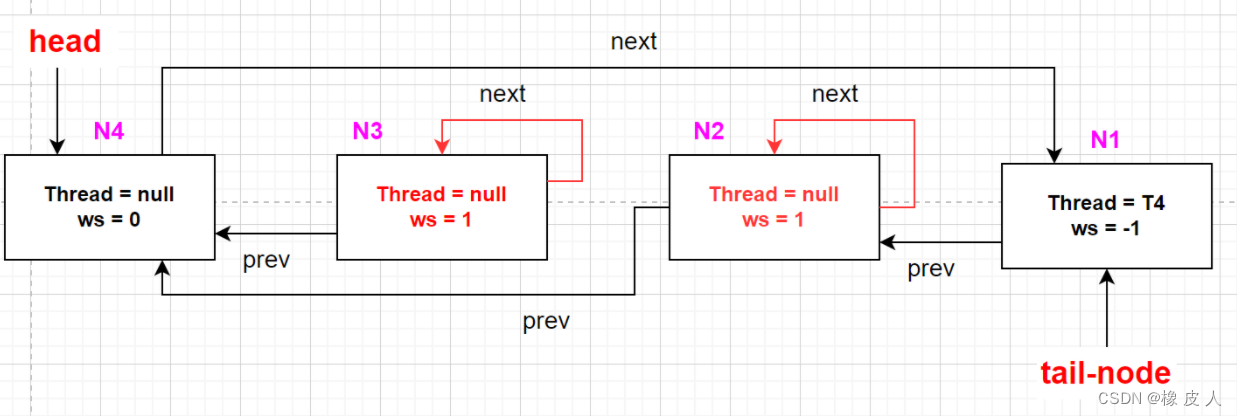
2.3 Node为尾节点
初始状态:即N1为Node节点
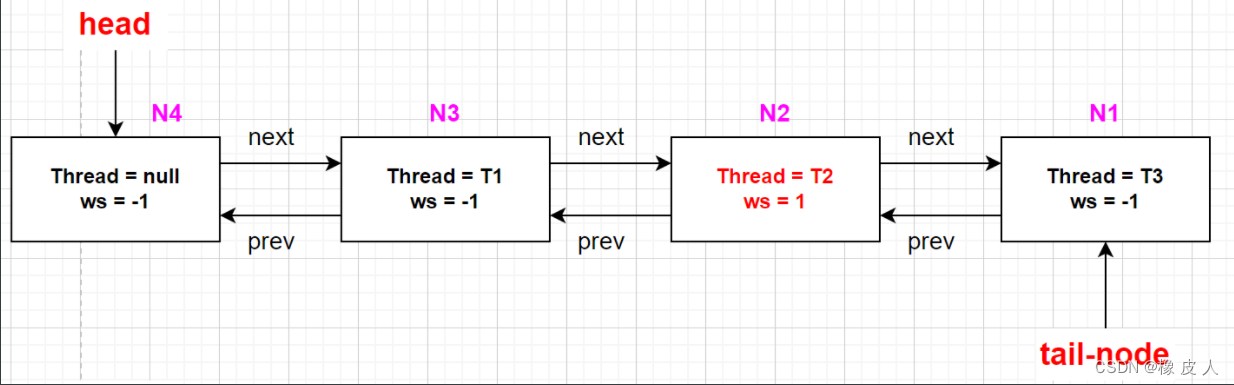
执行第一个红框:
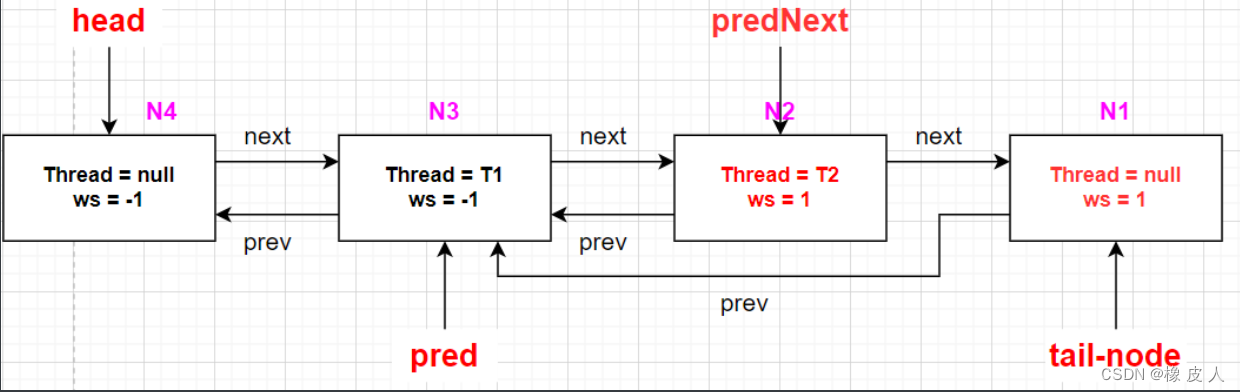
- 将Node结点Thread置空。
- Node节点的前驱结点N2的等待状态为CANCELLED,所以断开N1到N2的联系,并与N3建立联系。
- 将pred指向N3结点,predNext指向N2(这里不是node节点)并把Node结点的等待状态置为CANCELLED。
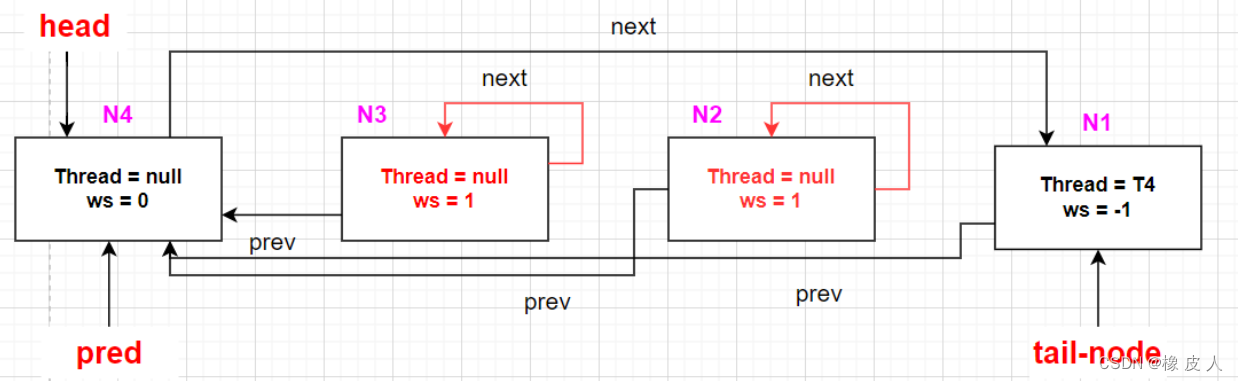
执行第二个红框:
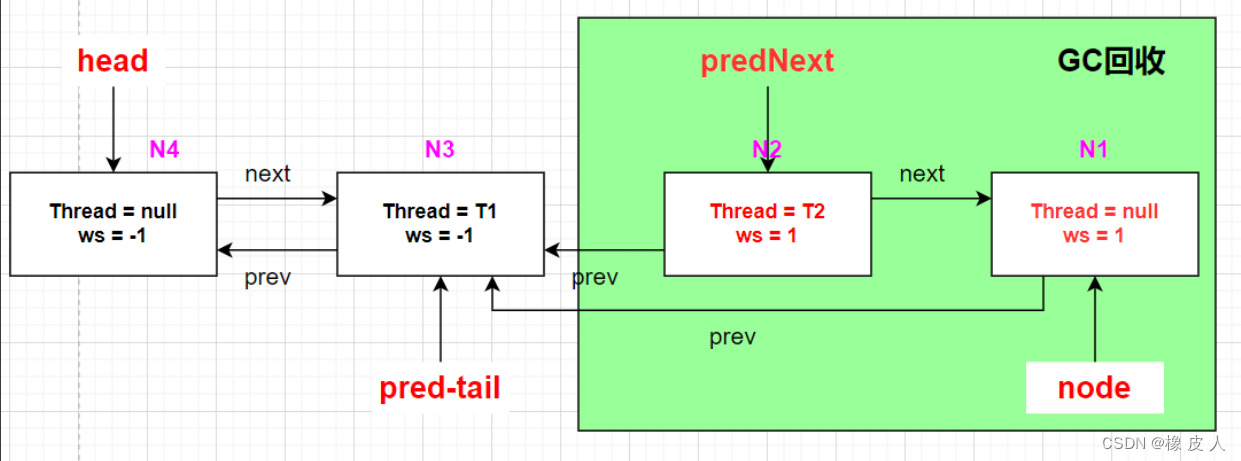
- 将pred设置为tail节点。
- 断开N3到N2结点的联系。
- 最后N1和N2节点会被GC回收。
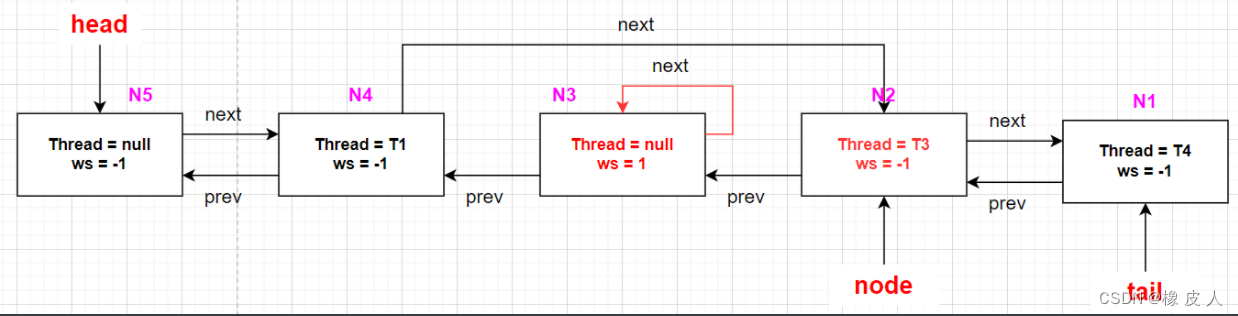
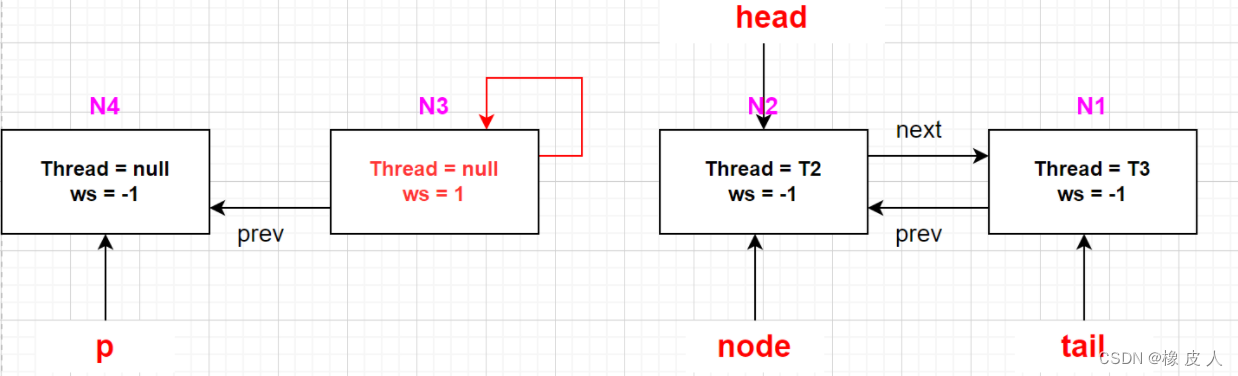
2.4 node为中间节点
2.4.1 N3节点取消流程
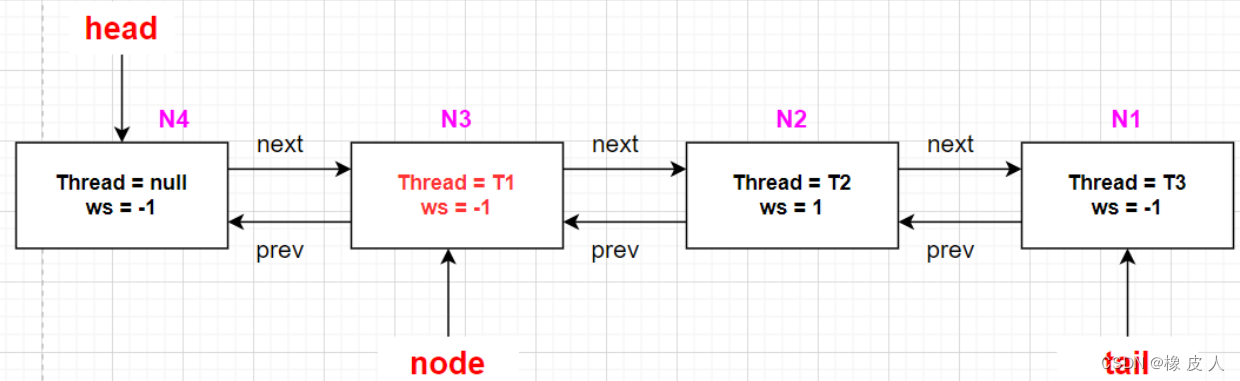
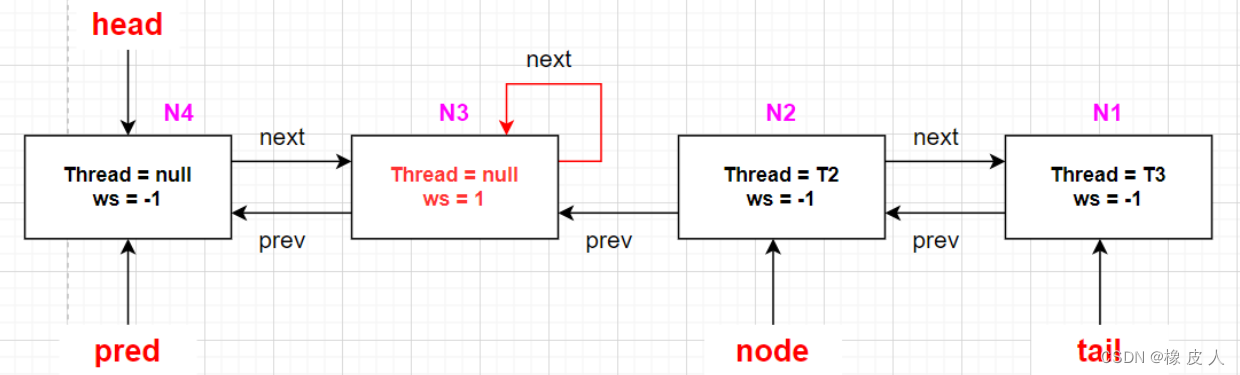
初始状态:Node节点为中间节点,既不是tail节点,也不是head节点的后继节点。
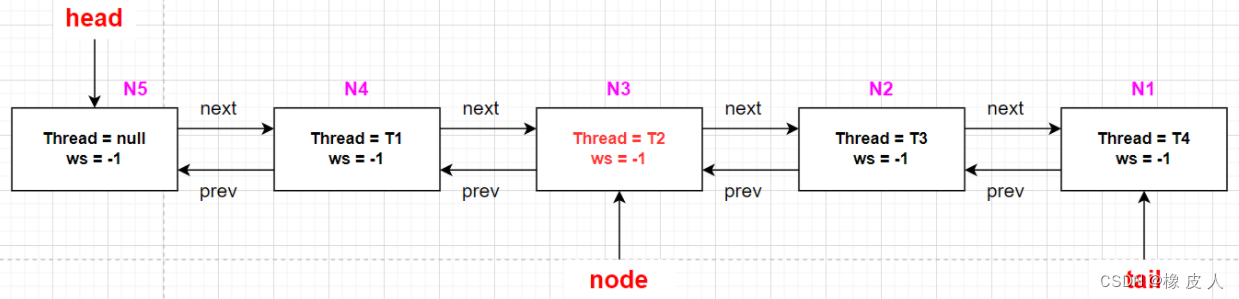
执行第一个红框:
- 将node的Thread置为null。
- pred指向N4,preNext指向N3,也就是node节点。
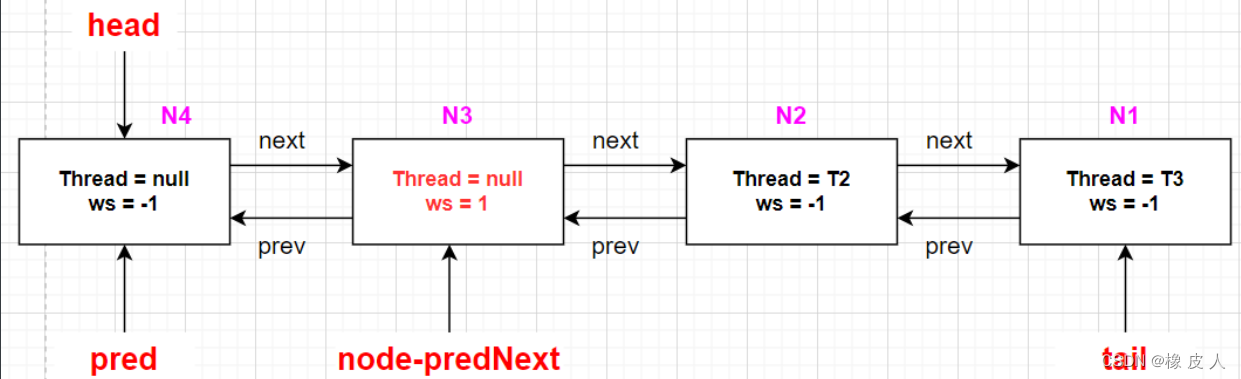
- 将node的等待状态置为CANCELLED。
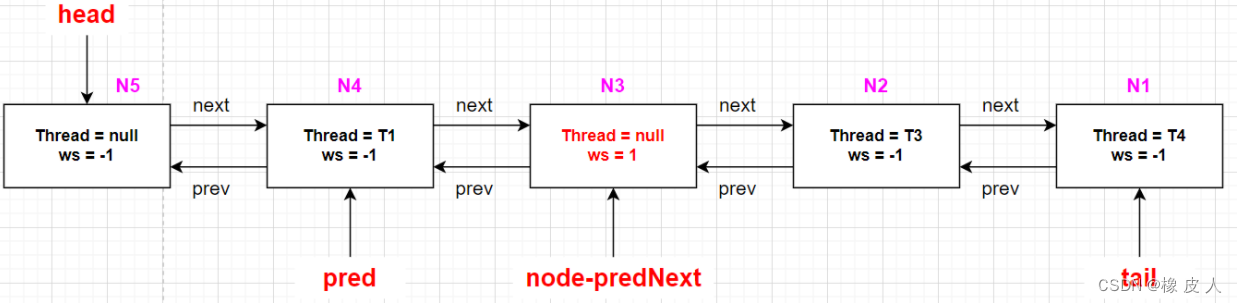
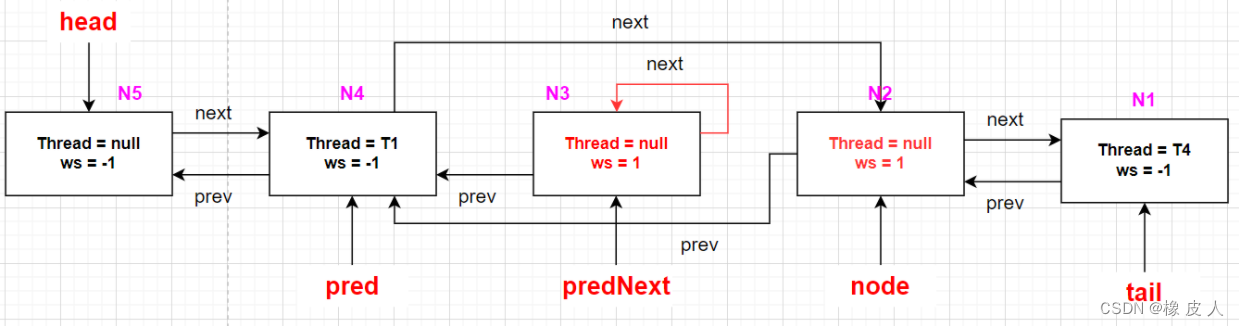
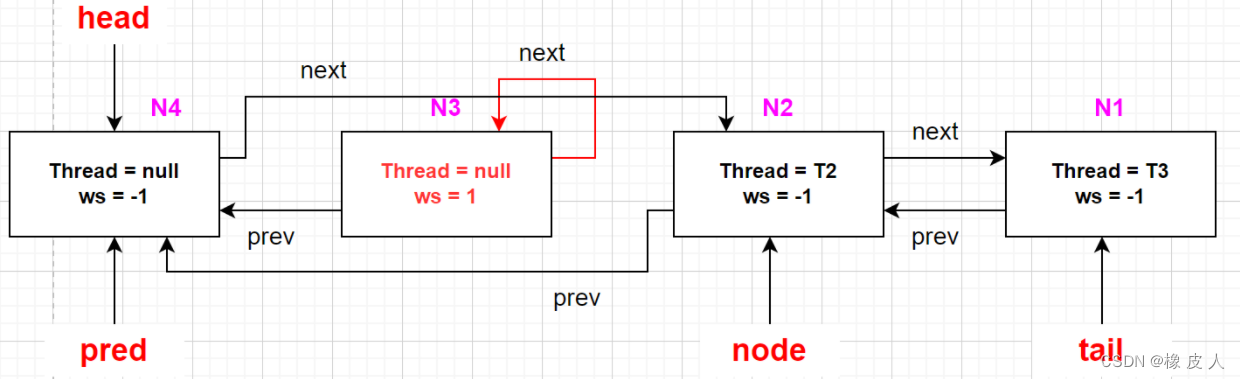
执行第二个红框:
- next指向node节点的后继节点N2。
- CAS将N4的后继节点置为N2。
- Node的后继节点指向自己。
注意:此时N2对N3的指针还没有断开,这就意味着N2并不会被GC回收,那么N2对N3的引用为什么不断开?当时作者也有点不理解,直到...假设N2也调用了cancelAcquire方法,下面一起来看一下。
2.4.2 继N3取消后N2取消逻辑
初始状态:N2为取消节点,这里就不作解释了。
执行第一个红框:
 执行第二个红框:
执行第二个红框:
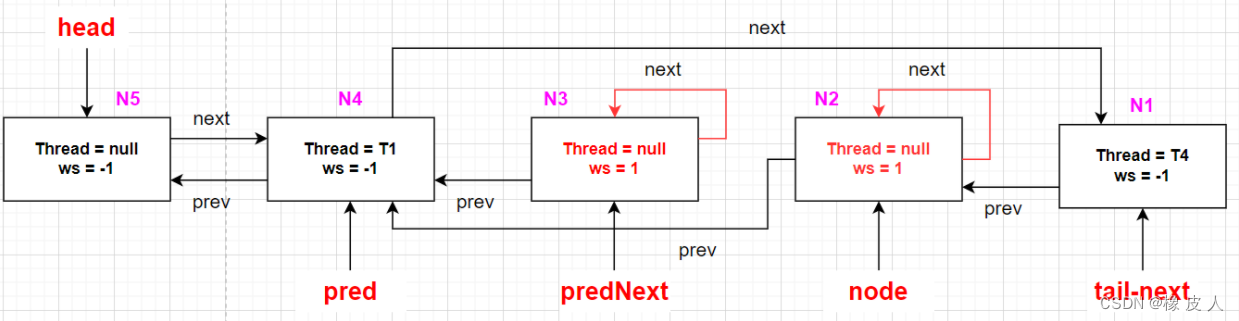
- N2执行完取消逻辑后,N3就会被GC回收。这里我们思考一下如果N3取消逻辑执行完之后就断开N2到N3的prev指针会发生什么?很简单,N2就遍历不到它前面的结点了,所以N3在取消时保留了N2到N3的指针。
- 再思考一个问题,N3被GC回收了,要是N2执行取消逻辑后,没有后继结点取消了,那N2如何被GC回收回收呢?
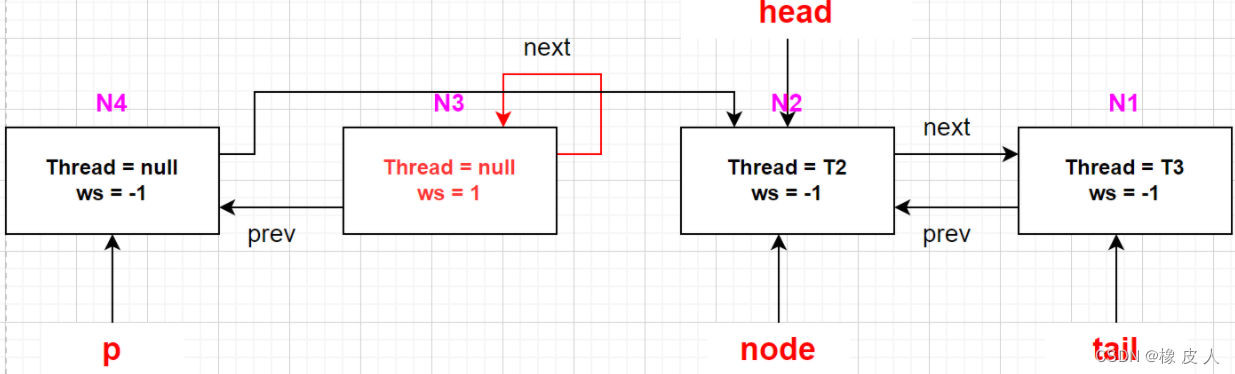
2.4.3 继N2取消后N2被GC回收逻辑
N2被GC回收其实是在N4结点成功获取同步状态且释放同步状态,并唤醒其后继节点N1时完成的,我们来看一下。
此时的N4为head结点,N1为node结点。
我们再来回顾下acquireQueued方法。
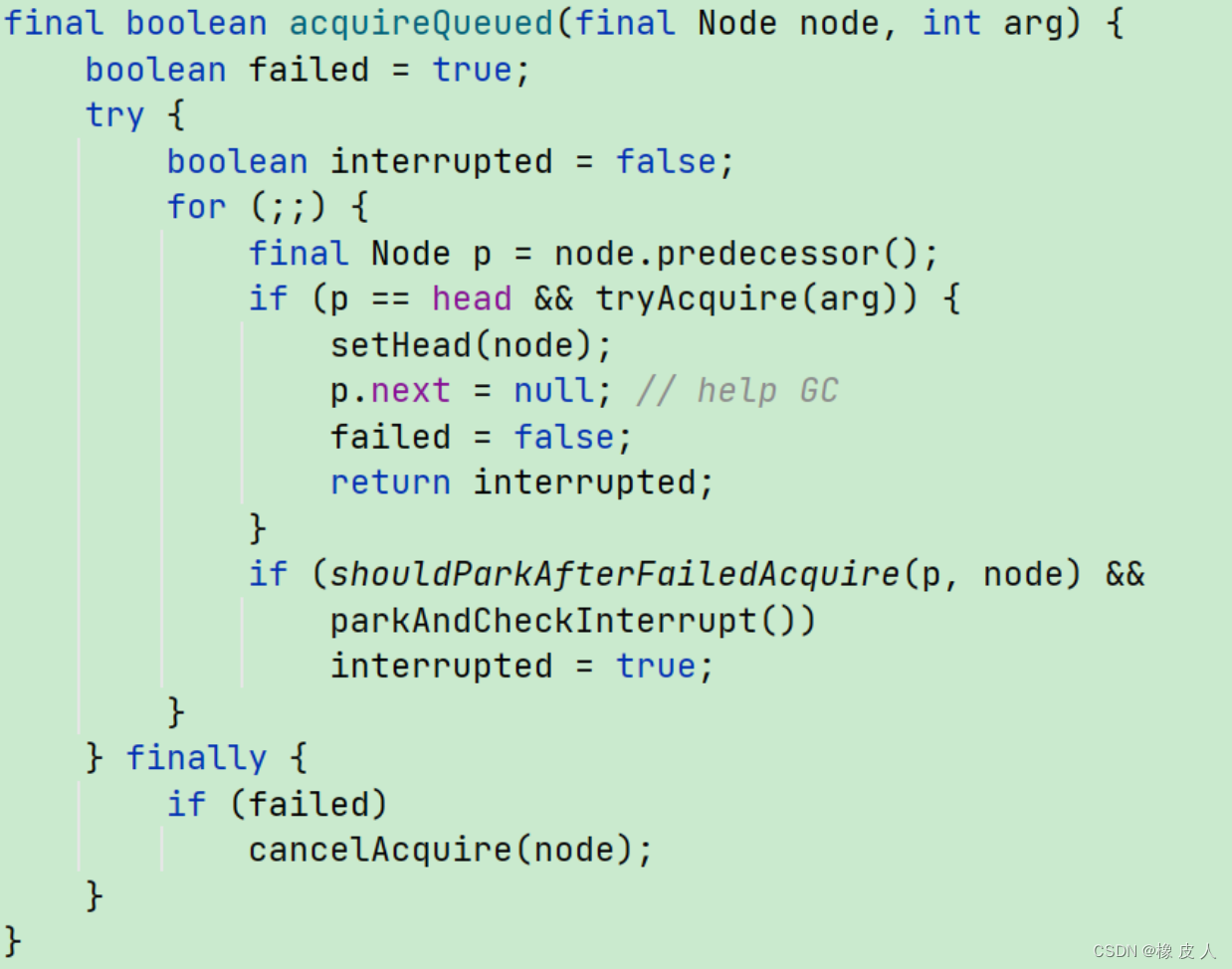 注意此时N1的prev还是N2,所以会执行shouldParkAfterFailedAcquire方法。
注意此时N1的prev还是N2,所以会执行shouldParkAfterFailedAcquire方法。
至此N2也会被GC回收,T4继续自旋,直到成功获取同步状态或出现异常。
-
所以取消节点被GC回收有两种情形:一是后继结点取消,二是后继结点被唤醒。
2.5 node为头节点的后继结点
2.5.1 N3的取消逻辑
初始状态:
执行第一个红框:
执行第二个红框:会调用unparkSuccessor方法
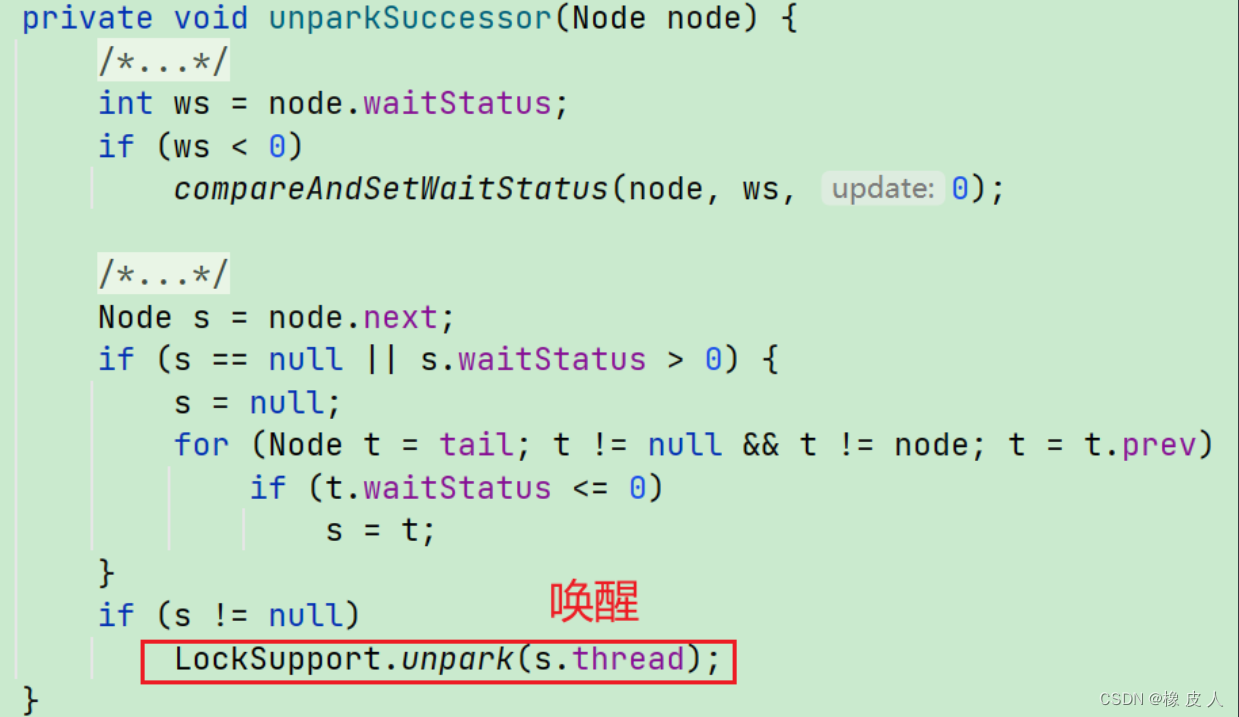
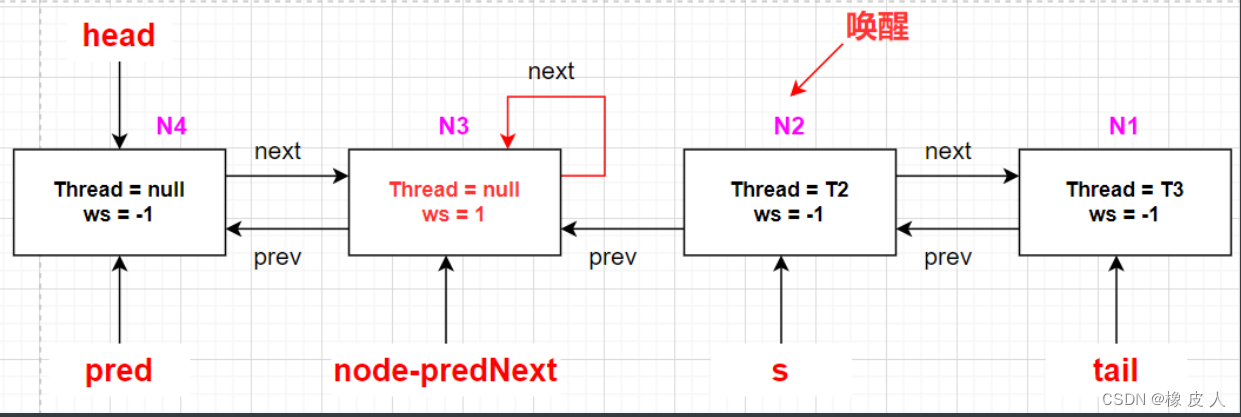
2.5.2 继N3取消逻辑N2被唤醒
N2被唤醒尝试获取同步状态,也就是执行acquireQueued方法。
初始状态:
执行acquireQueued方法:
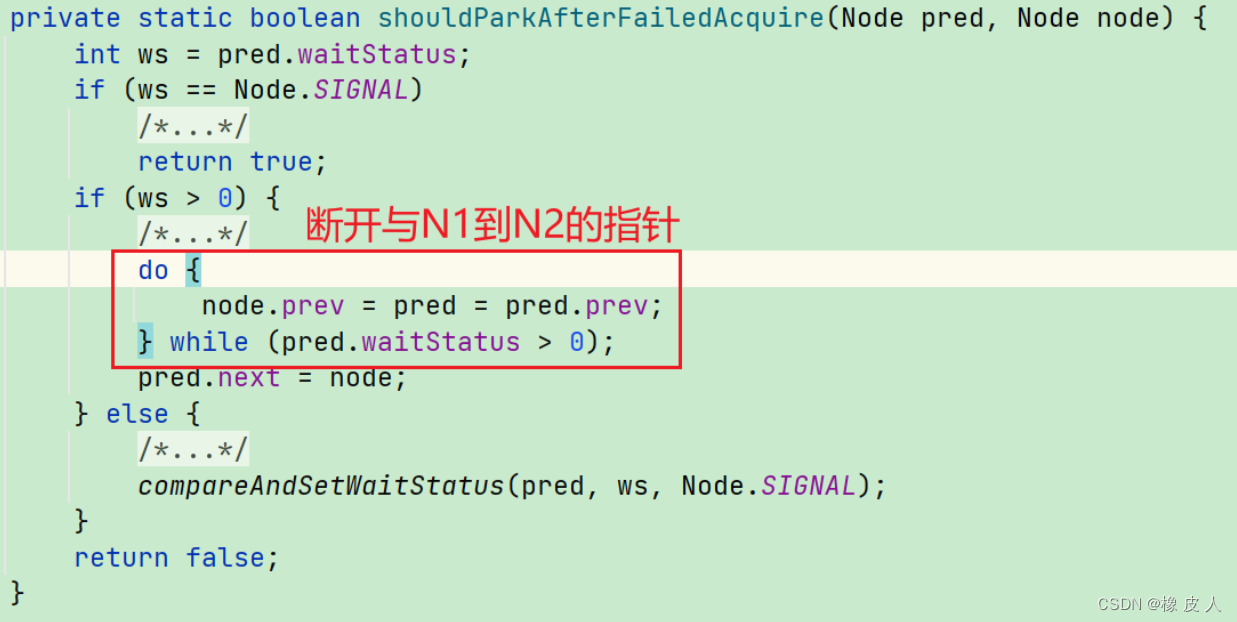
- 参考2.4.3 继N2取消后N2被GC回收逻辑,会调用shuldParkAfterFailedAcqquire断开N2到N3的指针。
- 然后回将pred的后继指针指向N2。
-
返回false,T2接着自旋,假设tryAcquire成功,执行setHead方法。
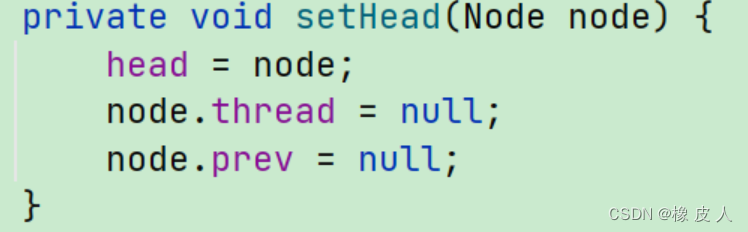
- 将head指针执行N2。
- 将node结点thread置为null。
- 将node的prev指针置为null。
接着有一段神奇的代码,将原head指向N2的next指针断开。
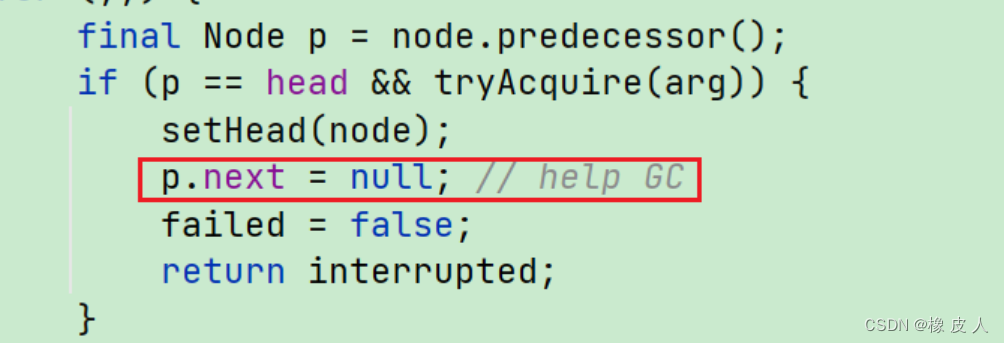
至此,原head结点完全脱离队列,等待GC回收。但不执行p.next=null似乎也符合GC的条件,那为什么要执行呢?
如果不执行p.next=null,垃圾回收器也能自动检测并回收,但这个过程相比较而言会更耗时。也就是如果p.next仍然引用N2,那么可能会遍历整个链表来标记垃圾,这就会花费更多的时间和资源才能发现并回收p结点。执行p.next=null可以明确地告诉垃圾回收器,与p关联的结点均为垃圾,并加速回收过程。
三、总结
- cancelAcquire方法就负责取消结点的逻辑,即将前置结点等待状态、线程置空、非取消和后置非取消结点联系起来、或在特定场景下唤醒后继结点。
- shouldParkFailedAcquire方法的作用就是挂起线程和队列调整进而GC回收取消节点,即当前结点前驱节点的等待状态为SIGNAL时,返回true,将当前线程挂起。反之会调整队列将取消结点进行GC回收。
还有setHead方法添加头节点(初始化队列)和删除头节点,p.next=null加速GC回收等等,每个方法甚至每段代码都配合的十分精妙,我只能说一句🐂🍺。
End:希望对大家有所帮助,如果有纰漏或者更好的想法,请您一定不要吝啬你的赐教🙋。