Stm32f103c8t6(proteus仿真)学习——8-1.输入捕获模式测量频率
目录
一、proteus原理图绘制
输入捕获模式测量频率,原理图如下
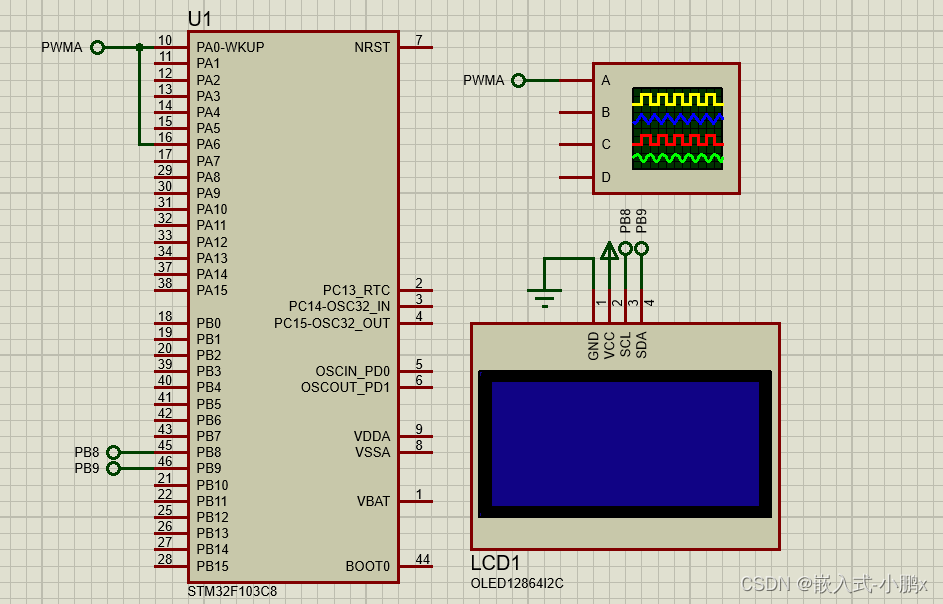
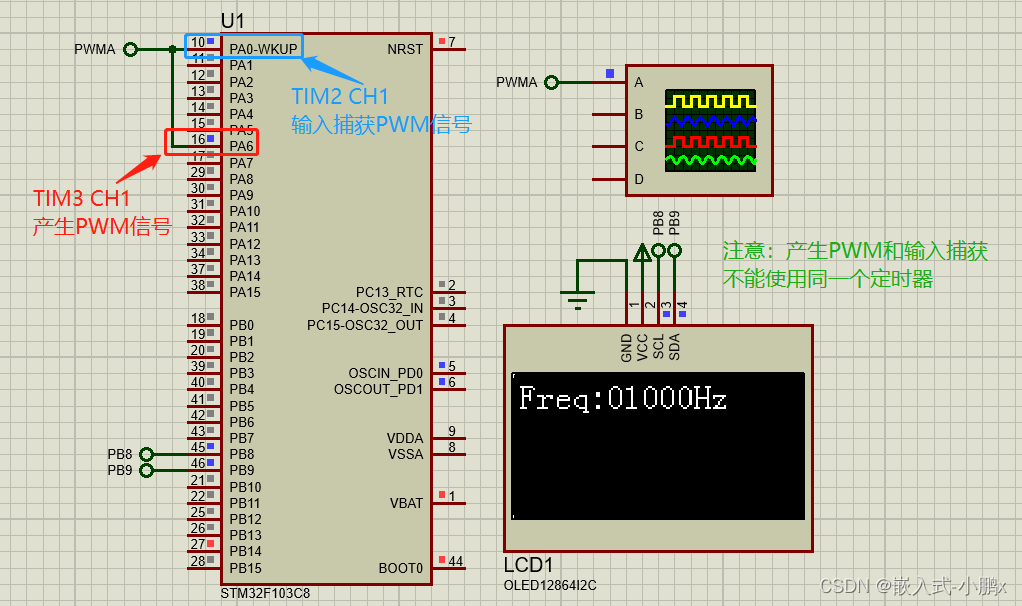
这里使用TIM3 CH1产生PWM信号,使用TIM2 CHI输入捕获PWM信号
对应引脚是 TIM3 CH1:PA6;TIM2 CH1:PA0
二、代码的编写
1. IC.c文件
此文件是用来配置输入捕获模式的
使用 TIM2 CH1:PA0
#include "IC.h"
void IC_Init(void) //输入捕获初始化函数
{
//GPIO的结构体定义,定义一个GPIO类型的结构体,名字为GPIO_InitStructure
GPIO_InitTypeDef GPIO_InitStructure;
//TIM_TimeBase的结构体定义,定义一个TIM_TimeBase类型的结构体,名字为TIM_TimeBaseInitStructure
TIM_TimeBaseInitTypeDef TIM_TimeBaseInitStructure;
//TIM_IC的结构体定义,定义一个TIM_IC类型的结构体,名字为TIM_ICInitStructure
TIM_ICInitTypeDef TIM_ICInitStructure;
//开启定时器2的时钟,注意是APB1(GPIO的是APB2)
RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM2, ENABLE);
//开启GPIO的时钟,注意是APB2
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA, ENABLE);
//输入捕获引脚的定义,TIM2 CH1 --> 对应 PA0
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IPU; //设置引脚为上拉模式
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_0; //PA0
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz; //引脚速度
GPIO_Init(GPIOA, &GPIO_InitStructure); //PA0
//选择定时器的内部时钟源 TIM2
TIM_InternalClockConfig(TIM2);
//配置定时器时基单元:TIM_TimeBase
//选择时钟分频,可以选择1分频、2分频和4分频
TIM_TimeBaseInitStructure.TIM_ClockDivision = TIM_CKD_DIV1; //选择1分频
//选择定时器计数方式,可选择向上计数、向下计数、中心对齐计数
TIM_TimeBaseInitStructure.TIM_CounterMode = TIM_CounterMode_Up; //TIM_CounterMode_Up:向上计数
/* 因为改变ARR的值会影响频率和占空比,改变PSC的值只会影响频率。所以选择ARR的值固定不变,修改PSC来改变频率 */
//设置ARR,即定时器周期:TIM_Period,取值0-65535
TIM_TimeBaseInitStructure.TIM_Period = 65536 - 1; //ARR设置为最大取值,65535
//设置PSC,即定时器预分频器的值:TIM_Prescaler,取值0-65535
TIM_TimeBaseInitStructure.TIM_Prescaler = 72 - 1; //PSC
//高级定时器才用的到,重复计算器,先用不上赋值为0
TIM_TimeBaseInitStructure.TIM_RepetitionCounter = 0;
//定时器TIM2的时基单元 TIM_TimeBase 初始化
TIM_TimeBaseInit(TIM2, &TIM_TimeBaseInitStructure);
//初始化配置定时器输入捕获单元:TIM_IC
//选择输入捕获的通道(4个通道可选IM_Channel_X,X可选1-4)
TIM_ICInitStructure.TIM_Channel = TIM_Channel_1; //TIM_Channel_1:通道1,TIM2通道1 对应 PA0
//设置输入捕获的滤波器的参数,取值0x0到0xF,取值越大,滤波效果越好
TIM_ICInitStructure.TIM_ICFilter = 0xF; //选择滤波参数为0xF
//选择输入捕获的极性,(上升沿触发、下降沿触发、上升沿和下降沿都触发)
TIM_ICInitStructure.TIM_ICPolarity = TIM_ICPolarity_Rising; //TIM_ICPolarity_Rising:上升沿触发
//设置输入捕获的时钟分频,可以选择1分频、2分频和4分频
TIM_ICInitStructure.TIM_ICPrescaler = TIM_ICPSC_DIV1; //TIM_ICPSC_DIV1:1分频
//设置输入捕获触发信号的输入选择,(可选择直连通道 和 交叉通道 等)
TIM_ICInitStructure.TIM_ICSelection = TIM_ICSelection_DirectTI; //TIM_ICSelection_DirectTI:直连通道
//TIM2输入捕获的初始化
TIM_ICInit(TIM2, &TIM_ICInitStructure);
//设置输入捕获的触发源(有8个触发源可以选择)
TIM_SelectInputTrigger(TIM2, TIM_TS_TI1FP1); //选择触发源:TIM_TS_TI1FP1
//设置从模式为Reset
TIM_SelectSlaveMode(TIM2, TIM_SlaveMode_Reset);
//启动TIM2定时器,使能TIM2
TIM_Cmd(TIM2, ENABLE);
}
uint32_t IC_GetFreq(void) //计算输入捕获的频率函数
{
//测周法:Fs = Fc/N
// Fc = 72M/(PSC+1),代入PSC=72得Fc=1M
// N就是读取CCR(比较值寄存器)的值,使用TIM_GetCapture1(TIM2)
return 1000000 / (TIM_GetCapture1(TIM2) + 1); //测周法:Fs = Fc/N,适用于低频信号
}
2. IC.h文件
#ifndef __IC_H
#define __IC_H
#include "stm32f10x.h" // Device header
void IC_Init(void);
uint32_t IC_GetFreq(void);
#endif
3. PWM.c文件
配置PWM(TIM3 CH1:PA6)
#include "PWM.h"
void PWM_Init(void) //PWM初始化
{
//GPIO的结构体定义,定义一个GPIO类型的结构体,名字为GPIO_InitStructure
GPIO_InitTypeDef GPIO_InitStructure;
//TIM_TimeBase的结构体定义,定义一个TIM_TimeBase类型的结构体,名字为TIM_TimeBaseInitStructure
TIM_TimeBaseInitTypeDef TIM_TimeBaseInitStructure;
//TIM_OC的结构体定义,定义一个TIM_OC类型的结构体,名字为TIM_OCInitStructure
TIM_OCInitTypeDef TIM_OCInitStructure;
//开启定时器3的时钟,注意是APB1(GPIO的是APB2)
RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM3, ENABLE);
//开启GPIO的时钟,注意是APB2
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA, ENABLE);
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP;
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_6;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOA, &GPIO_InitStructure);
//选择定时器的内部时钟源 TIM3
TIM_InternalClockConfig(TIM3);
//配置定时器时基单元:TIM_TimeBase
//选择时钟分频,可以选择1分频、2分频和4分频
TIM_TimeBaseInitStructure.TIM_ClockDivision = TIM_CKD_DIV1; //TIM_CKD_DIV1:1分频
//选择定时器计数方式,可选择向上计数、向下计数、中心对齐计数
TIM_TimeBaseInitStructure.TIM_CounterMode = TIM_CounterMode_Up; //TIM_CounterMode_Up:向上计数
//设置ARR,即定时器周期:TIM_Period,取值0-65535
TIM_TimeBaseInitStructure.TIM_Period = 100 - 1; //ARR
//设置PSC,即定时器预分频器的值:TIM_Prescaler,取值0-65535
TIM_TimeBaseInitStructure.TIM_Prescaler = 720 - 1; //PSC
//高级定时器才用的到,重复计算器,先用不上赋值为0
TIM_TimeBaseInitStructure.TIM_RepetitionCounter = 0;
//TIM_TimeBase初始化
TIM_TimeBaseInit(TIM3, &TIM_TimeBaseInitStructure);
//初始化配置定时器输出比较单元:TIM_OC
//设置输出比较的模式:TIM_OCMode_PWM1,PWM1模式
TIM_OCInitStructure.TIM_OCMode = TIM_OCMode_PWM1;
//设置输出比较的极性:TIM_OCPolarity_High;高极性:有效电平为高电平
TIM_OCInitStructure.TIM_OCPolarity = TIM_OCPolarity_High;
//设置输出使能
TIM_OCInitStructure.TIM_OutputState = TIM_OutputState_Enable;
//设置捕获比较寄存器 CCR 的值
TIM_OCInitStructure.TIM_Pulse = 0; //CCR
//初始化定时器3通道1
TIM_OC1Init(TIM3, &TIM_OCInitStructure);
//使能定时器3
TIM_Cmd(TIM3, ENABLE);
}
void PWM_SetCompare1(uint16_t Compare)
{
TIM_SetCompare1(TIM3, Compare); //设置捕获比较寄存器 CCR 的值
}
void PWM_SetPrescaler(uint16_t Prescaler) //设置PSC的值
{
TIM_PrescalerConfig(TIM3, Prescaler, TIM_PSCReloadMode_Immediate); //TIM_PSCReloadMode_Immediate:立即生效
}
4. PWM.h文件
#ifndef __PWM_H
#define __PWM_H
#include "stm32f10x.h" // Device header
void PWM_Init(void);
void PWM_SetCompare1(uint16_t Compare);
void PWM_SetPrescaler(uint16_t Prescaler); //设置PSC的值
#endif
5. main.c文件
#include "stm32f10x.h"
#include "OLED.h" //OLED显示屏
#include "PWM.h" //PWM输出
#include "IC.h" //输入捕获
#include "delay.h"
int main(void)
{
delay_init();
OLED_Init(); //OLED初始化
PWM_Init();
IC_Init(); //输入捕获初始化 PA0,TIM2通道1
OLED_ShowString(1, 1, "Freq:00000Hz");
PWM_SetPrescaler(720 - 1); //频率Freq = 72M / (PSC + 1) / 100
PWM_SetCompare1(50); //占空比Duty = CCR / 100
while(1){
OLED_ShowNum(1, 6, IC_GetFreq() , 5);
}
}
6. 效果展示
输入捕获模式测量频率,效果如下
三、项目(代码+仿真)分享链接
百度网盘
链接:https://pan.baidu.com/s/1pcVtAcER2mAwnQnyRL3aXQ
提取码:p8q4